About Us
Sample Pic
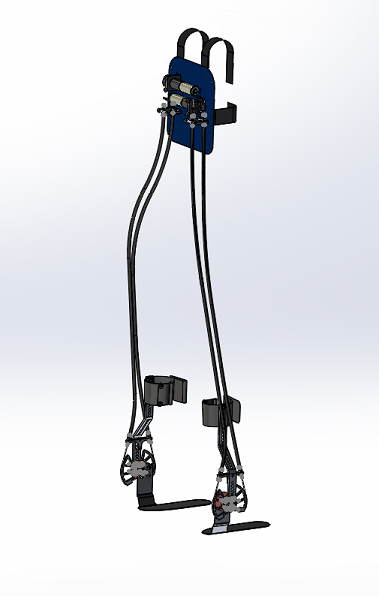
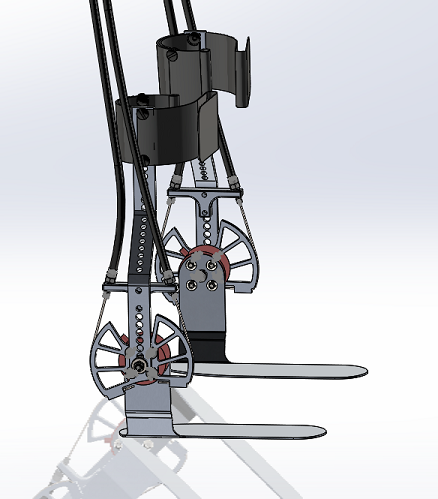
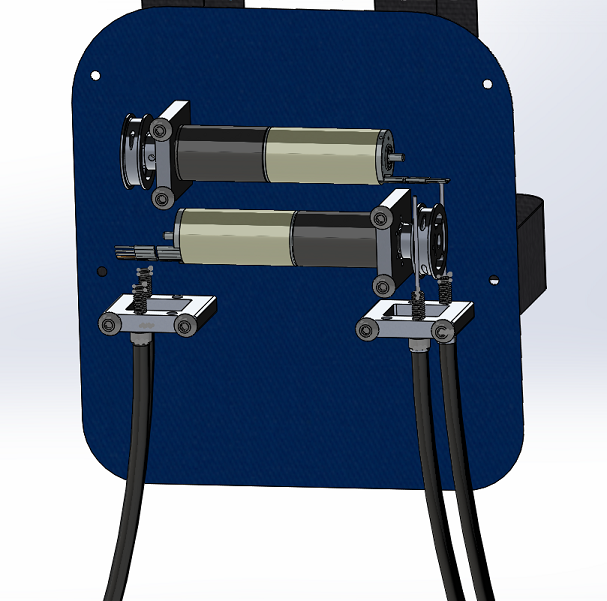
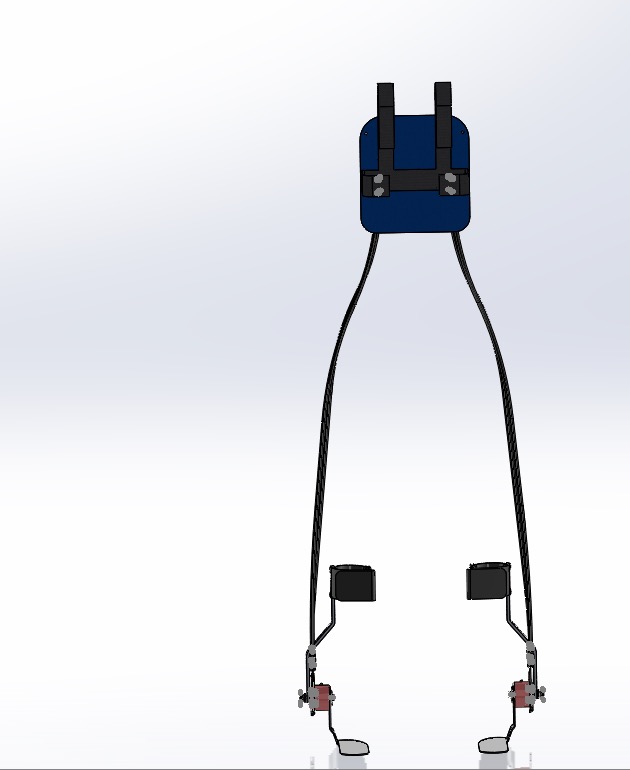
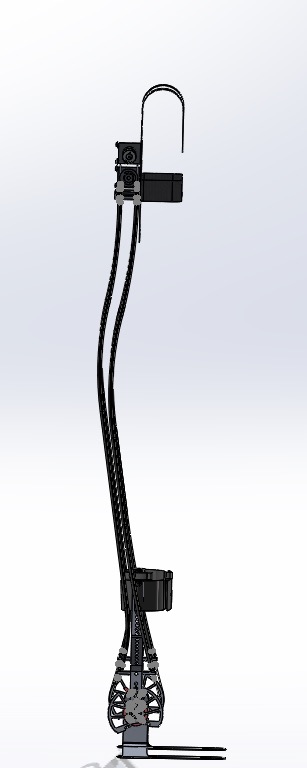
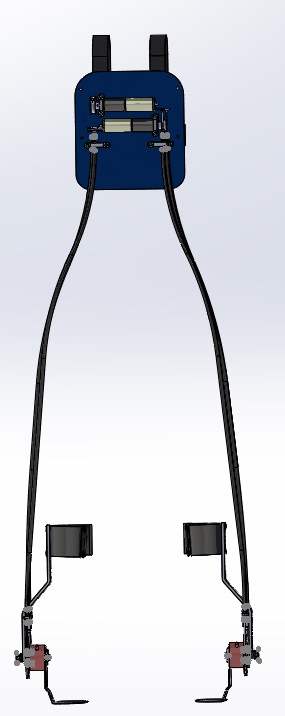
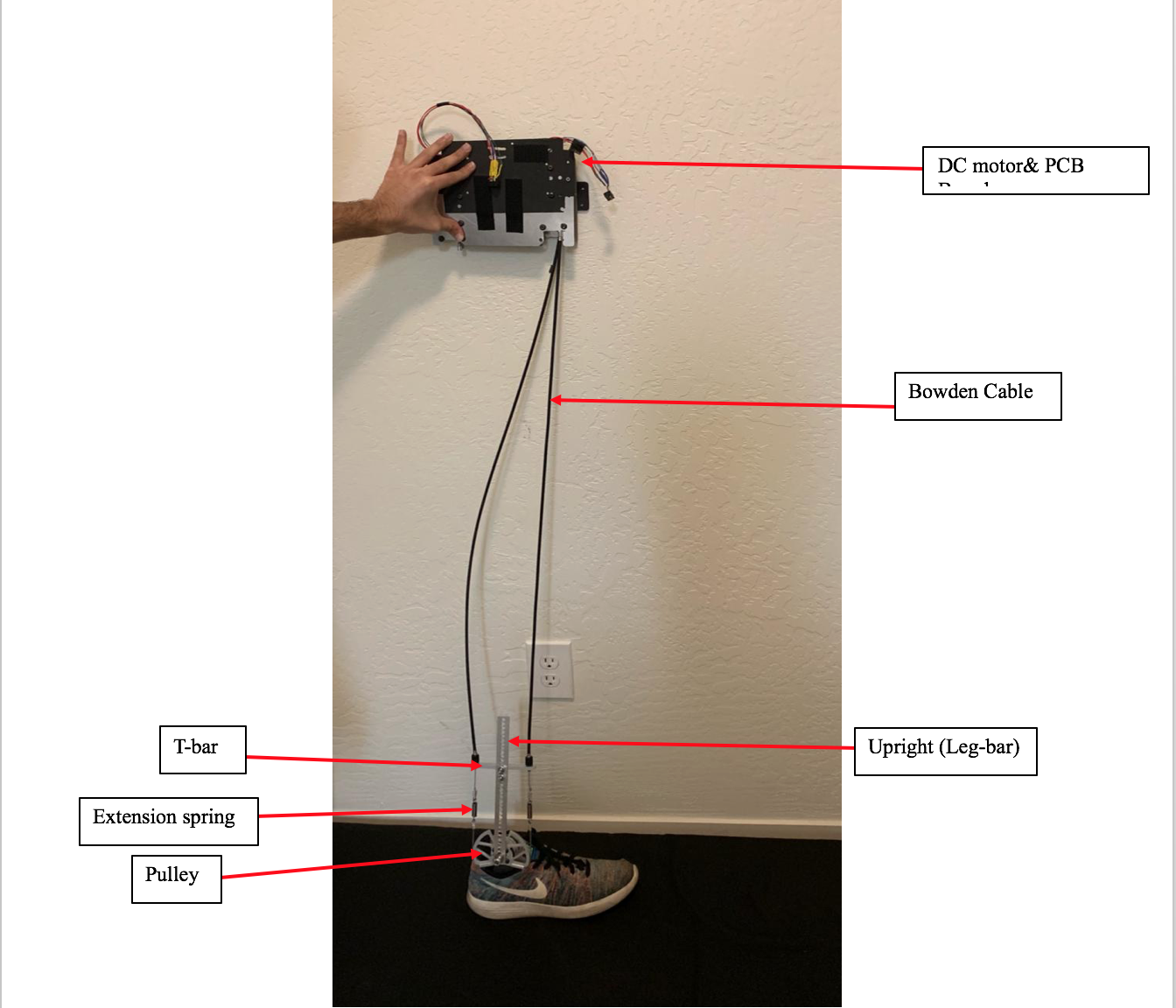
Lerner Exoskeleton Actuator
The purpose of this project is to design a series elastic actuation system for a robotic lower-extermity exoskeleton. The system will be actuated by a high-performance DC motor. Series elasticity will be implemented in the form of linear or rotation springs. In addition to the design and manufacturing of the system, the capstone team will be asked to provide an analytical characterization of system performance, validated through experimentation.