Testing
Testing
This project will require testing of the individual sensor sub-systems separately and their operation when working side-by-side on the central computer; the Intel NUCPAH11i5. The first test to be conducted is range testing for the LiDAR, RealSense Cameras, and for both of them together. The range testing plan for the LiDAR and RealSense Cameras has been successfully completed and will be provided within this document. Next, testing of how successfully the LiDAR, Intel NUC, and Intel RealSense Cameras can be integrated together will be completed. Then, testing to show that everything can stream data together effectively. This includes all of the testing that needs to be accomplished this semester given the time/budget constraints. However there is some more testing that could be accomplished if all the equipment that has yet to be purchased with the new research grant (as described in Design Review 2) arrives. In the case that the necessary equipment does not arrive in time, Isaiah will most likely accomplish the testing over the summer. These tests include testing the stability of the drone with all of the components placed on the drone, testing the power consumption of the drone to ensure a flight time of at least thirty minutes, testing the navigational system to traverse the forest undamaged, and other related tests that have not been foreseen. With a drone of this nature, a lack of components to test, and a large portion of the project being software based, a lesser range of tests than other projects has been constructed. This project’s testing is mostly related to the anticipated functionality of systems, sub-systems, and individual components.
Testing Plan
February: Range Testing for the Hesai Pandar XT-32 LiDAR
April 7th - 16th: Range Testing for the Intel RealSense Depth Cameras
Field-of-view and Overlap Point Testing for the Intel RealSense Depth Camera System
April 14th - 27th: Integration of the Intel RealSense Depth Camera System and Hesai Pandar XT-32 LiDAR with the Intel NUC i5 and ROS1 or ROS2 Depending on Updates
Future Testing ( Most Likely Over the Summer ): Stability Test with all of the Components on our Drone
Power Consumption Test for 30 Minute Flight Time
Navigational System Test in Scenario Clear of Obstacles
Navigation System Test in Forest Scenario
Testing Matrices
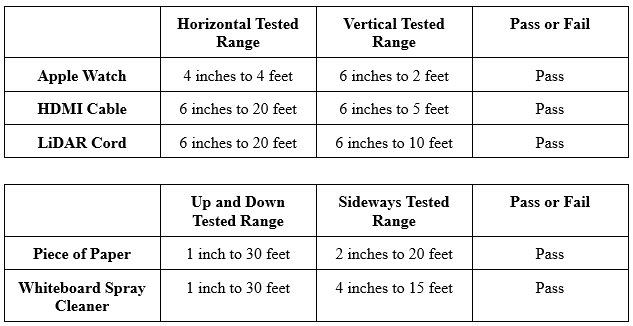
Table 1: Testing Matrix for Pandar XT-32 LiDAR
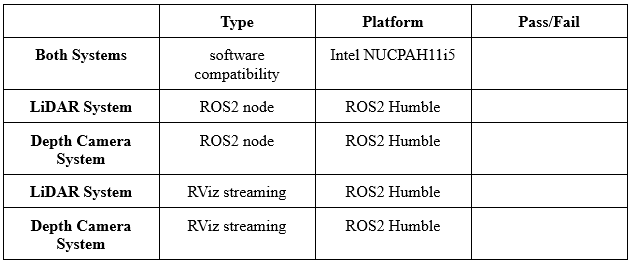
Table 2: System Testing Matrices
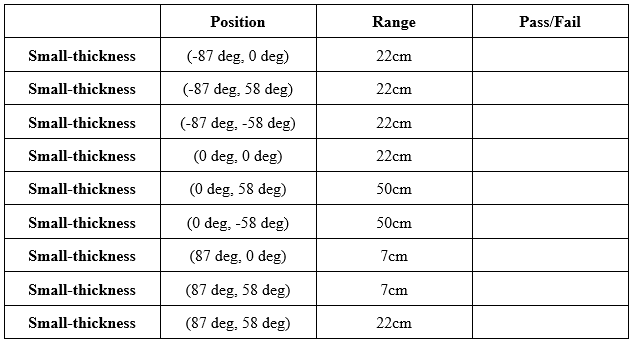
Table 3: Field of View along with Overlap Point Testing Matrix for the Intel RealSense Depth Camera System
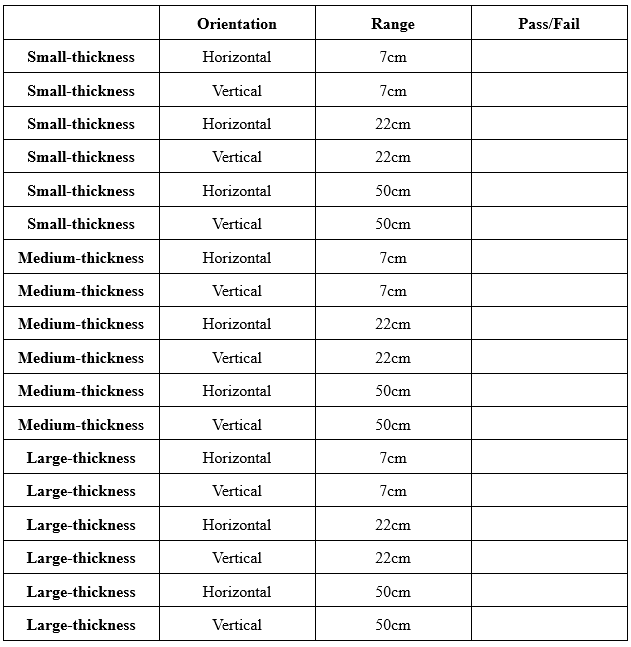
Table 4: Range Testing Matrix for RealSense System