Progress/Schedule
Progress Update December 16th, 2022
Prototype 1: Hesai 3D-LiDAR Mapping and Testing
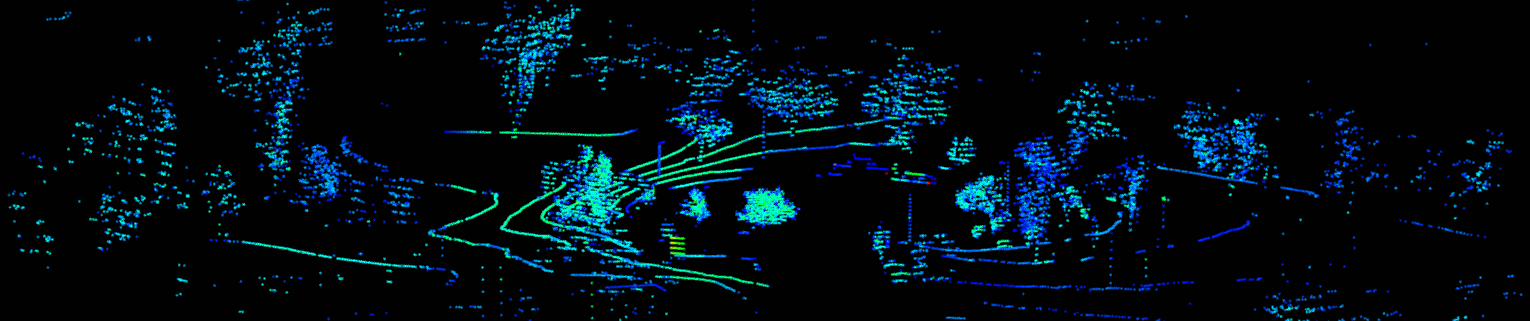
Figure 11: LiDAR Mapping at John W. Teets Park
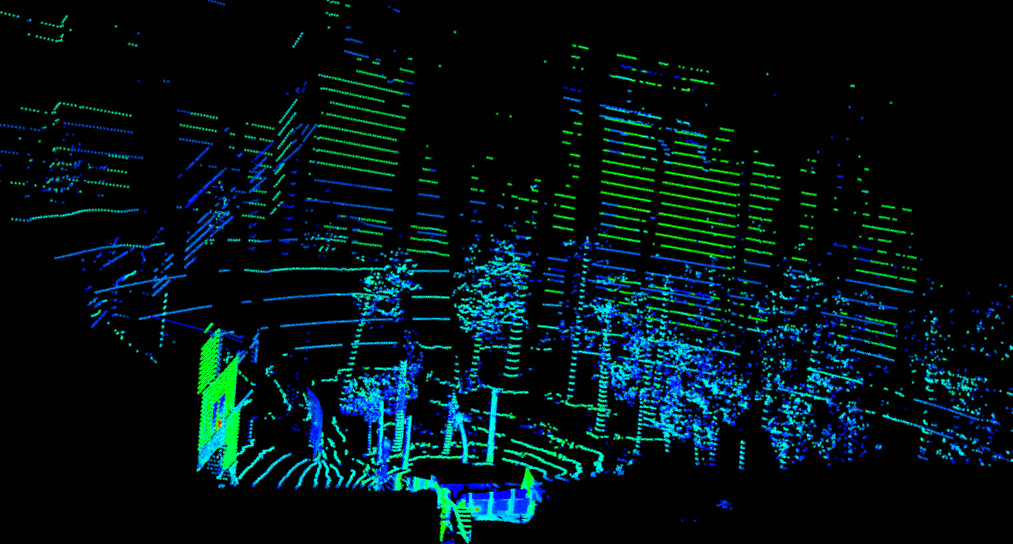
Figure 12: LiDAR Mapping at Fremont Station
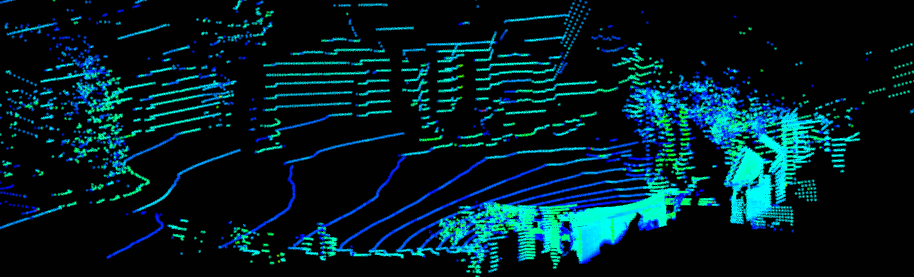
Figure 13: LiDAR Mapping of Cul-de-Sac
Prototype 2: Intel RealSense Camera
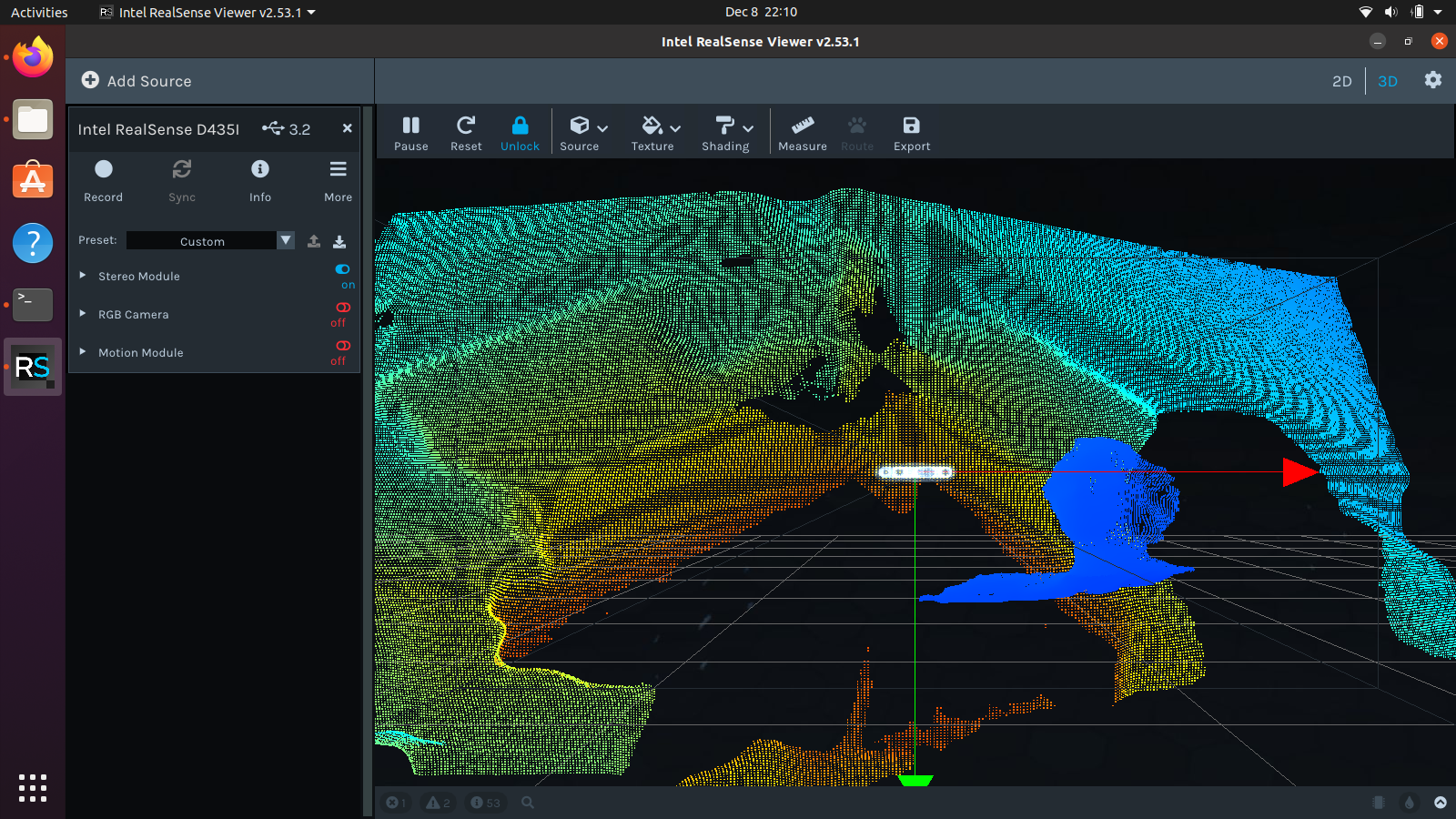
Figure 14: Pointcloud Output from D435i

Figure 15: Map from Pointcloud (Right)
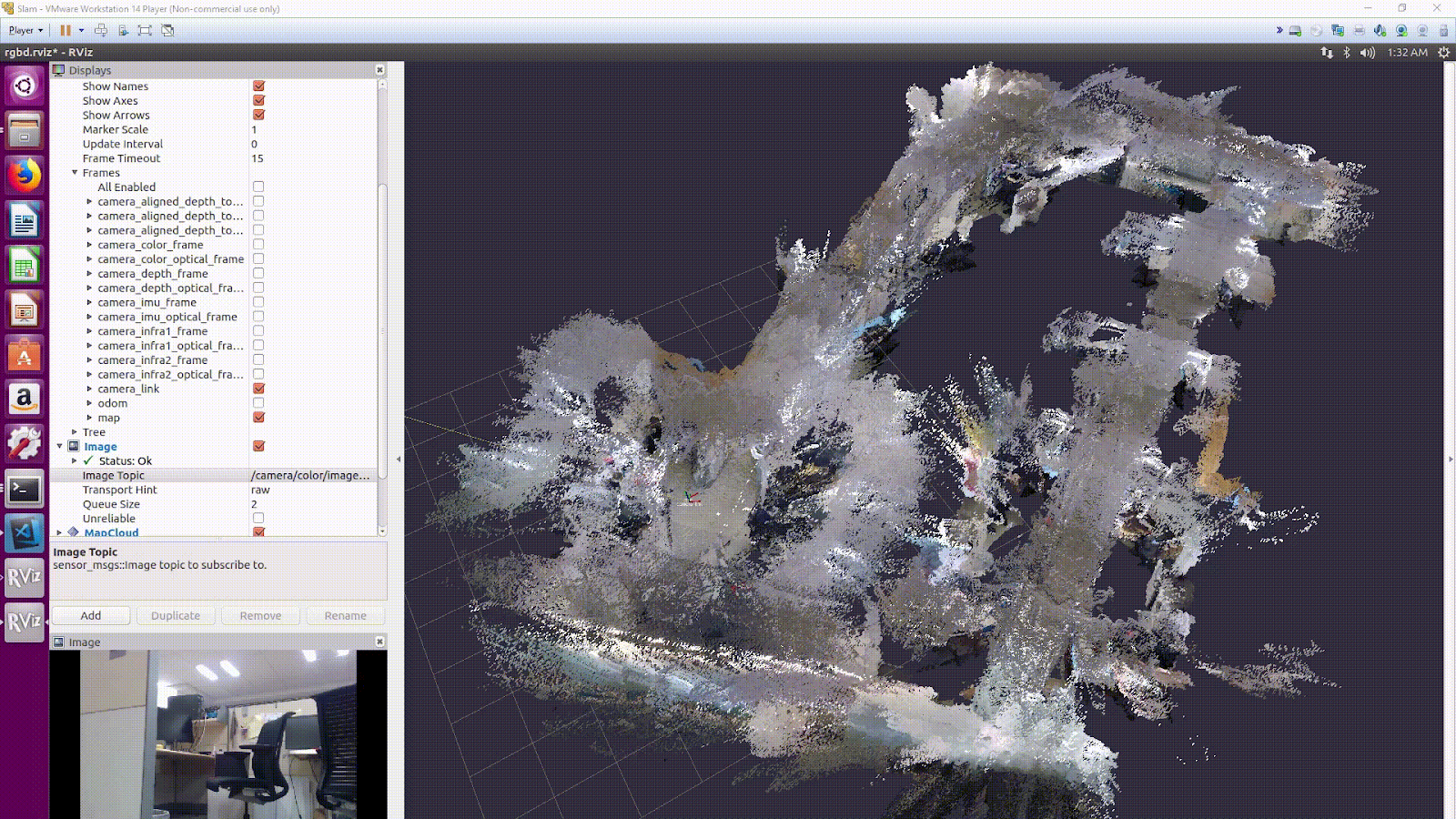
Figure 16: Pointcloud from RealSense SLAM
Progress Update April 21st, 2022
Prototype 3: Complete Navigation System with Pandar XT-32 LiDAR, Intel RealSense Camera System, Intel NUC i5, and ROS1
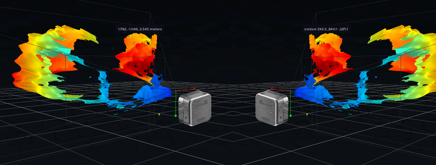
Figure 17: Two-Camera Point Cloud with RealSense D405

Figure 18: RealSense Multi-Camera Configuration Example
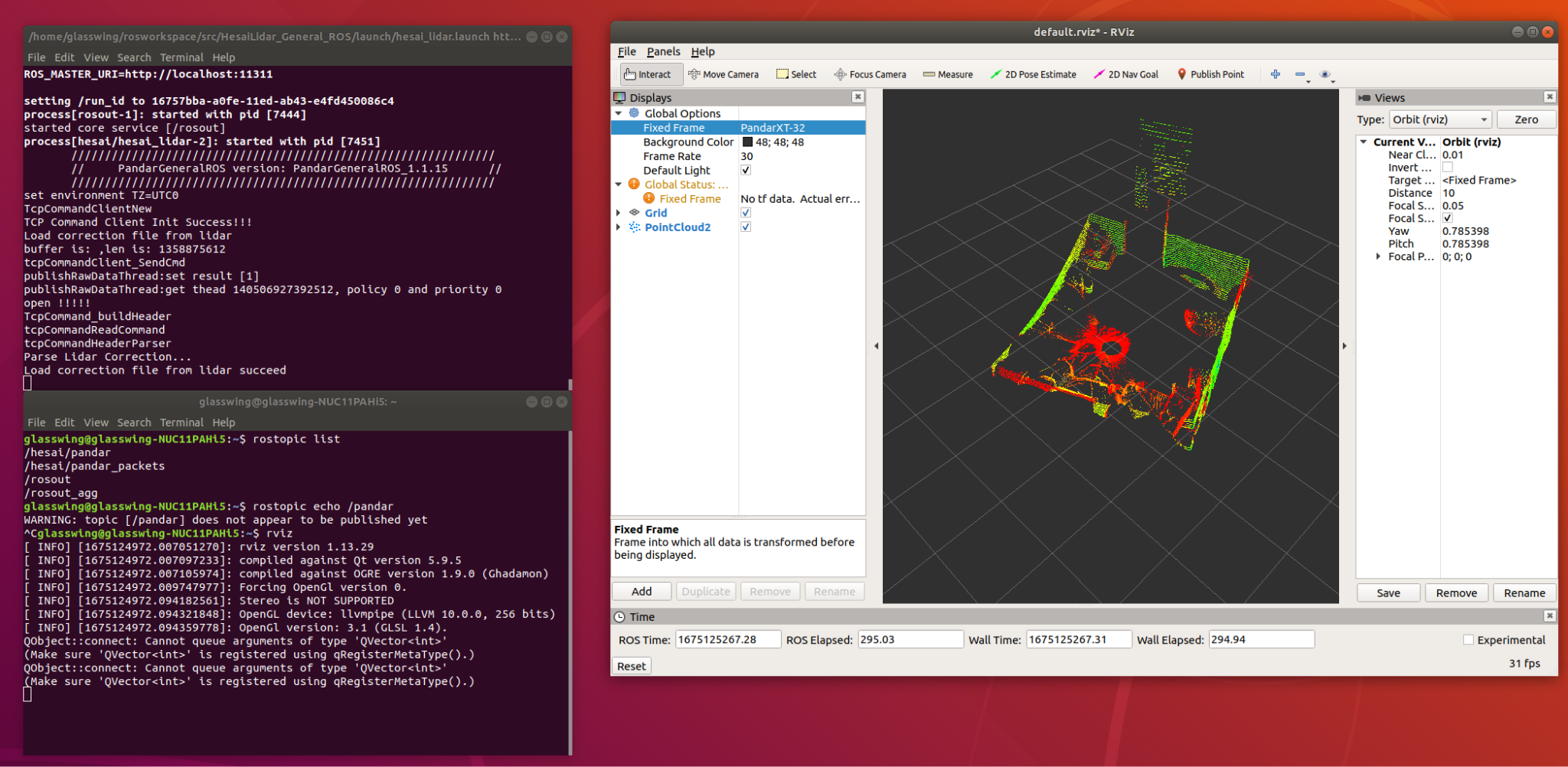
Figure 19: Pandar XT-32 with ROS1
Schedule (Gantt Chart)
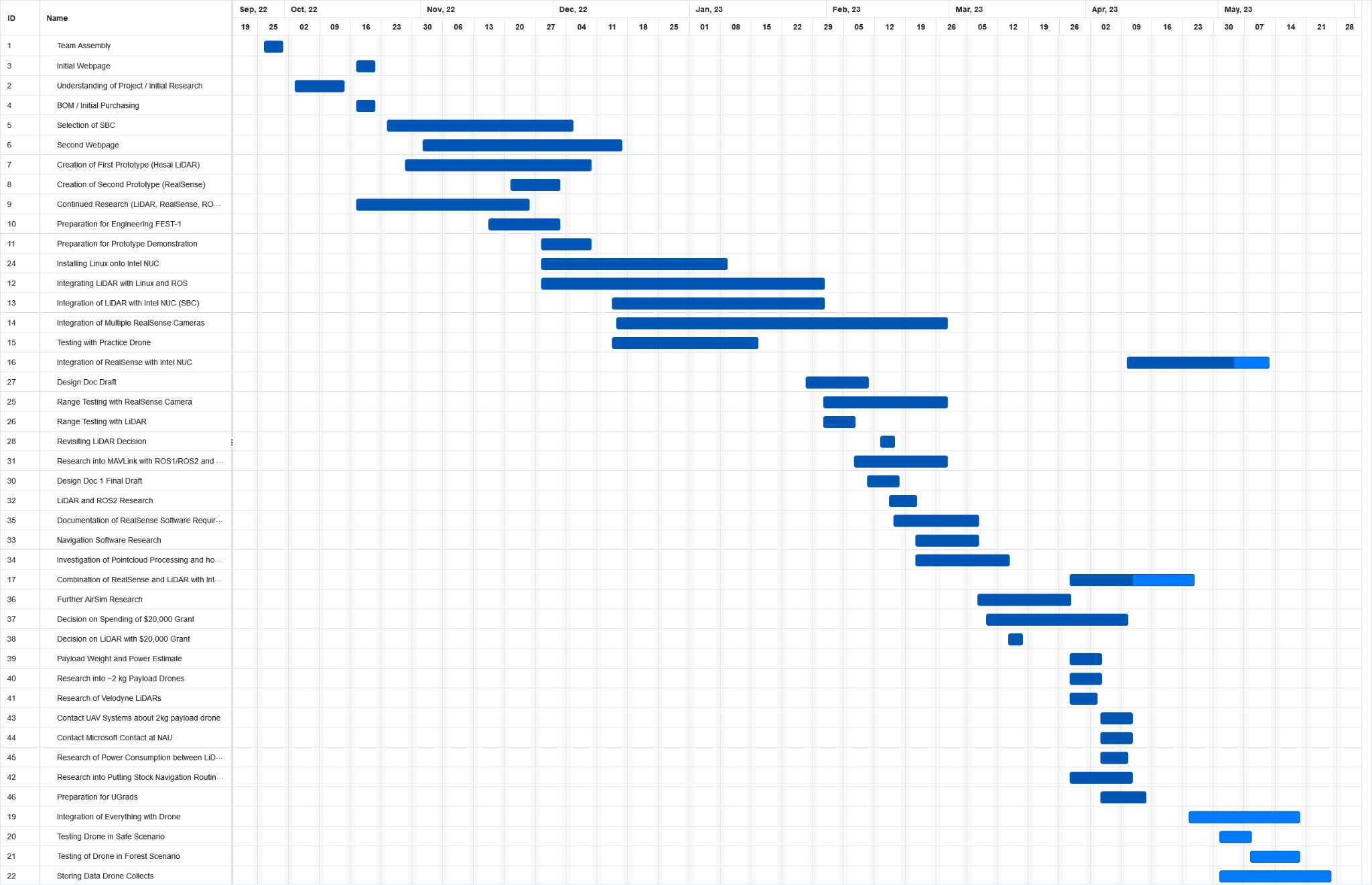
Figure 20: Gantt Chart Spanning our Entire Project