Results
Final Results and Prototype
This project's results most importantly include two independent sensor systems running cohesively in a custom Linux environment on the Intel NUC single-board computer. The first system is the Hesai Pandar Xt-32 LiDAR; the second is the two-camera Intel RealSense D405 system with an aligned and fused point cloud. The Linux environment is built on top of Ubuntu Linux distribution and includes a ROS noetic installation, Hesai XT-32 drivers, the Intel RealSense SDK 2.0, and the RealSense-ROS wrapper. Extensive research and testing was done to ensure the compatibility of the Ubuntu distribution, Linux kernel, hardware drivers, and software wrappers. The final result is a system that could feasibly be mounted on a drone and can stream data from both sensor systems simultaneously. This final system is a solid platform from which an larger system can be built when time and funding permit. It is also extremely modular and thus easily scalable. This will be critical in the future, specifically when scaling the Intel RealSense camera system to the projected 5-8 cameras.
A large accomplishment was the rewrite of Intel’s camera data tensor transformation script for compatibility with ROS2. This script facilitates data fusion from multiple cameras. After completion, the new script allowed for successful multi-camera data fusion in the ROS2 prototype. Unfortunately, the ROS2 prototype was scrapped because of a lack of driver support from Hesai. However, this script can be utilized in the future when the project is transitioned to ROS2. It will also be made open-source and available for other researchers' use.
Additionally, the project resulted in the creation of detailed documentation and instructions that can be handed down to the next researchers assigned to this project. Documentation of all of the research into RealSense and HESAI LiDAR technology will be crucial for the future development of this project. Additionally, the software environment created on the NUC SBC will need to be understood by future researchers so they can build upon it and improve it. Highly detailed instructional and informational documents created for this project include a Linux computer guide, RealSense to NUC connection guide, two-camera RealSense system setup guide, interactive payload estimator spreadsheet, and drone development kit options.
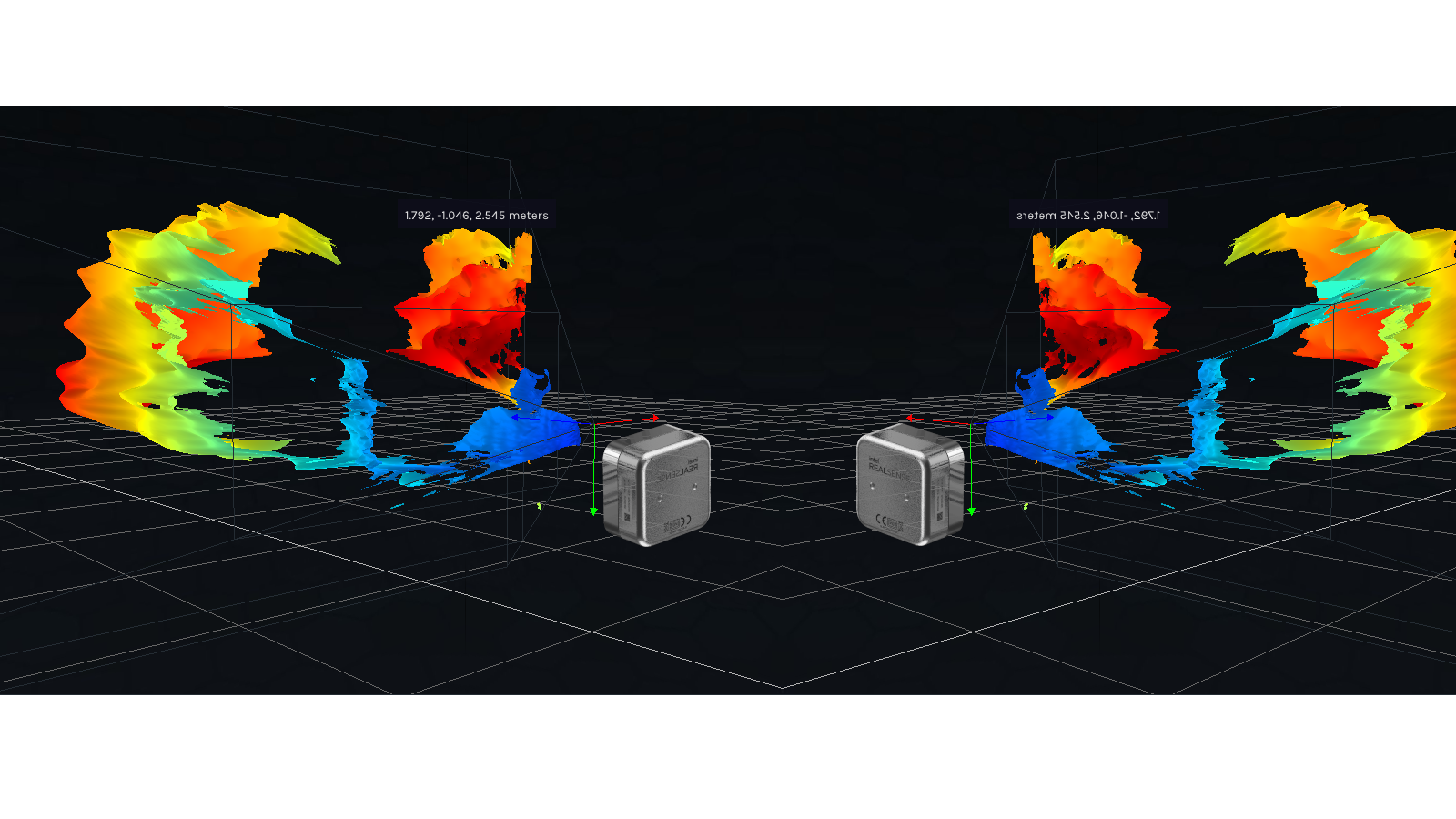
Figure 21: Two-camera Intel RealSense D405 system point cloud demonstration.
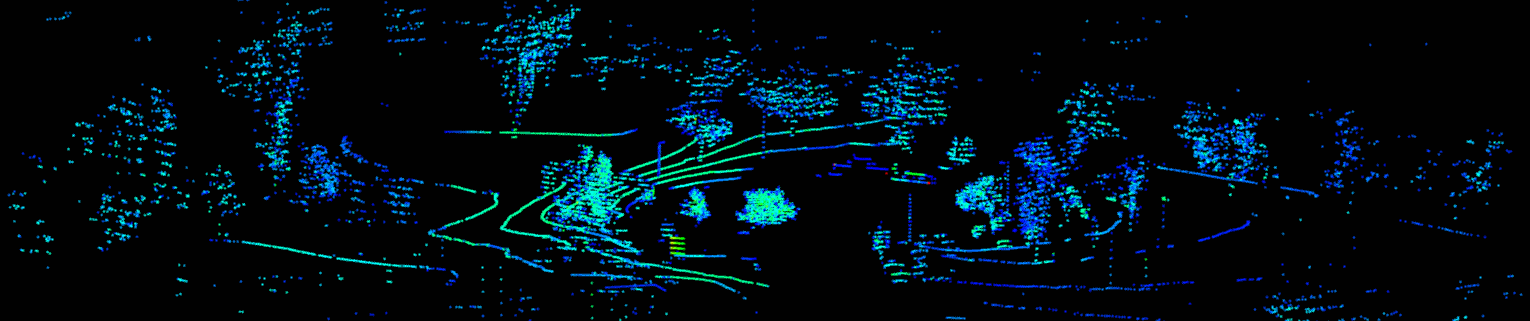
Figure 22: Point cloud from the Hesai Pandar XT-32 LiDAR system in an outdoor forest setting