Project Description
A multi-year robotics project
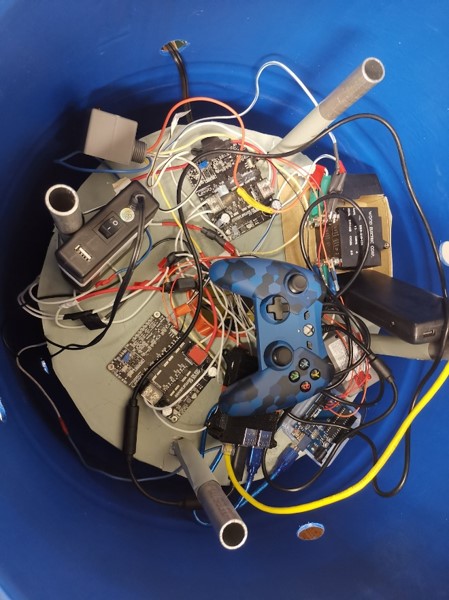
On the highest level, our client, Dr. Leverington, wants a robot platform that can be used for future education. He wants something that can be used to teach robotics to future students. Our team is the second team to work on this project. Last year, the team started from scratch, building the robot from the ground up. They completed the body of the robot, added batteries, wheels, motors, control electronics. The robot is controlled by an Xbox video game controller. The Xbox communicates with the Raspberry PI microprocessor (this is the ‘brain’ of the robot). The Raspberry PI controls the motors through an Arduino and motor controllers. Eventually, this robot platform should be able to navigate autonomously through the engineering building and give tours to people. We are adding several pieces to the puzzle towards making this goal a reality. The robot needs the ability to take the elevator to navigate through the Engineering building. Therefore, the robot needs an arm that can press the elevator button. It also needs a camera attached to the arm so that it may recognize the floor numbers. This is our primary task in the project. That is, we must make or buy a robot arm that can press the elevator buttons, and attach a camera to the arm.
Eventually, this robot platform should be able to navigate autonomously through the engineering building and give tours to people. We are adding several pieces to the puzzle towards making this goal a reality. Most importantly, the robot needs the ability to take the elevator to operate through the Engineering building. Therefore, the robot needs an arm that can press the elevator button. It also needs a camera attached to the arm so that it may recognize the floor numbers. This is our primary task in the project. That is, we must make or buy a robot arm that can press the elevator buttons, and attach a camera to the arm.
Another important task we have been assigned is to connect an Xbox Kinect. The Kinect is a combination of a depth sensor and a standard RGB camera. This device is needed to enable the robot to sense its surroundings. It will be an essential component in the future autonomy of the robot. Connecting the sensor is relatively simple. We simply need to connect it to the robot’s 12V power source (which we have already connected temporarily).
Finally, we need to update the robot’s power system. The last capstone group used two battery packs for their 5V and 12V sources. However, Dr. Leverington requested that we update this system. The main power source for the robot are two large 24V batteries. Dr. Leverington would like the 24V batteries to be the only power source to eliminate the need to charge three separate supplies. To do this, we are going to replace the 5V and 12V supplies with convertors (i.e. replace the 5V supply with a 24-5V convertor, and the 12V supply with a 24-12V convertor). This update will make the robot more robust, and eliminate the need to charge three separate supplies.