Key milestones
Key milestones, main tasks, and outputs, including a comprehensive list of all completed tasks
1. Created a schedule and Gantt chart for the semester.
2. Presented the schedule to the class.
3. Created the backbone for the team's website, as well as periodic updates.
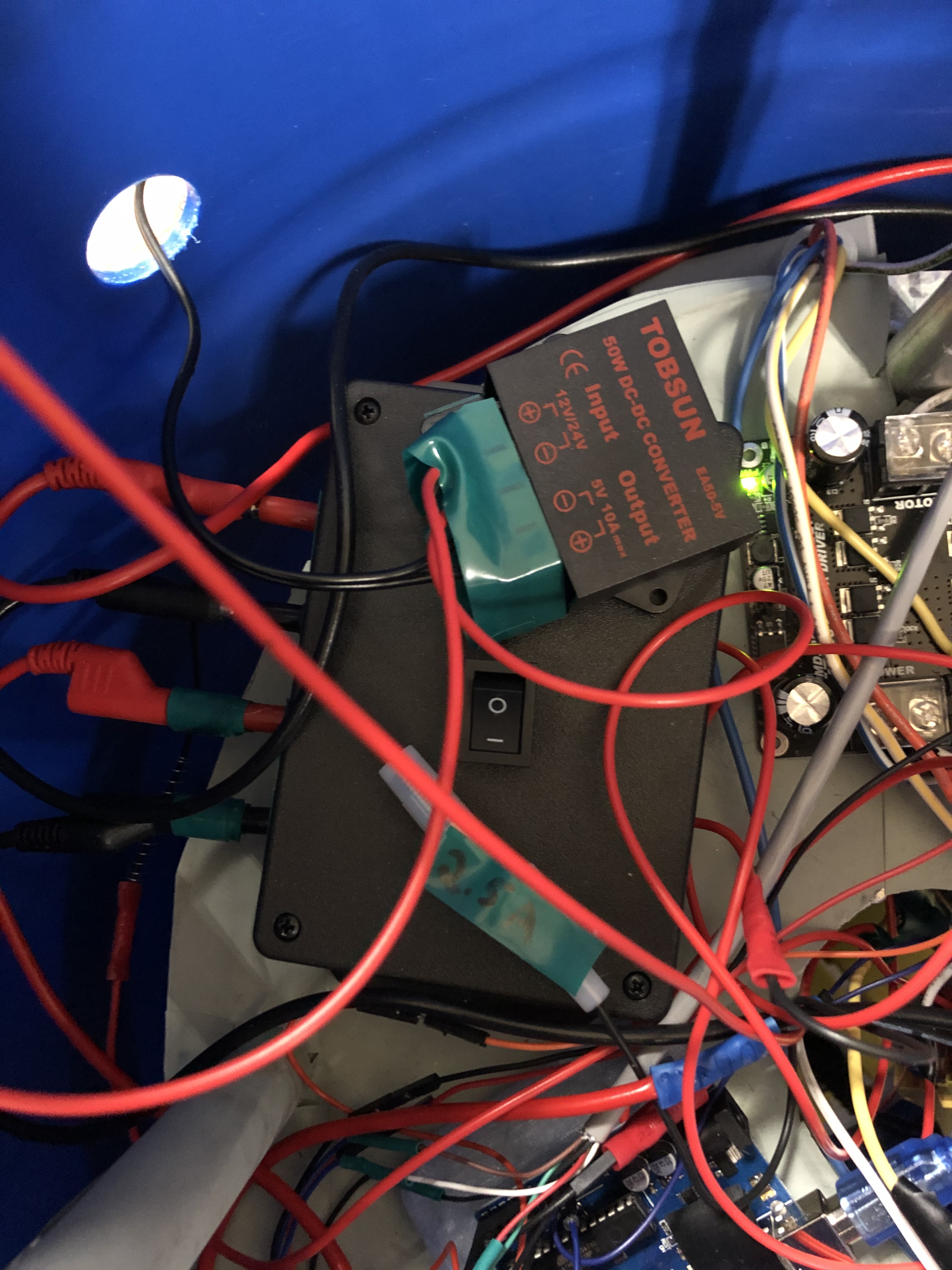
4. Replaced the 5V and 12V battery packs with DC-DC converters powered by the robot's 24V supply.
5. Determined requirements and specifications for the arm.
6. Ordered an arm that fit the specifications.
7. Assembled the arm (it came in parts).
8. Compiled a design review and presented it to the class.
9. Designed a base to elevate the arm to reach the elevator buttons.
10. Assembled the base by cutting wood to length and attaching with screws.