
Subsystems of the project
For our entire project, we have broken it down to 5 subsystems. These 5 subsystems are:
For each subsystem, we build a prototype to demonstrate its basic function. Click the link above to see the details of each prototype.
Each of our 5 subsystems fit with one another in a way that will produce a very effective EOD Robot. If one of our subsystems does not works or has faults, then our entire project will be affected. This relation between each subsystem can be seen in the image displayed below:
Subsystems of the project

The team choose to use KOOKYE robot smart car platform, this platform is 28 x 25 x 11cm, which is large enough to hold the robotic arm, and it is using climbing track, which is the one what we chose from our discussion (decision matrix).
For the MG25-370, we choose this because in is 12v and the rated torque is 3000 g*cm, it means that it power enough to drive the whole platform.
The L298N(motor controller module), is cheap and easy to code.
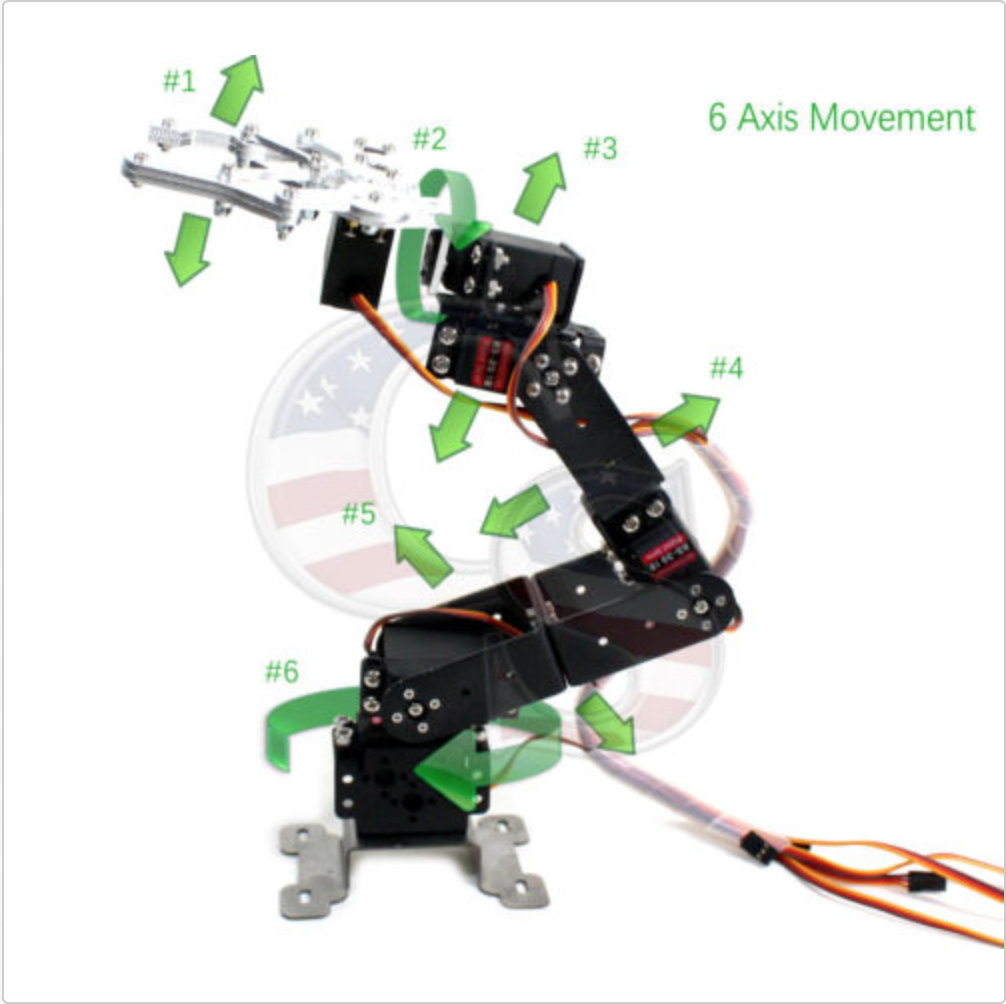
We picked this solution for the arm/hand subsystem because a 6 axis movement arm is the best way to mimic a human arm, which is something that we want to happen since the robotic arm is going to be controlled using a MPU 6050 planted on the user's arm by a glove/sleeve. Also, we ended up picking the 2 fingered clamp as the hand for our robot due to realizing that this solution would be most ideal for our group because it is cost effective, easy to control, stable and functions well.
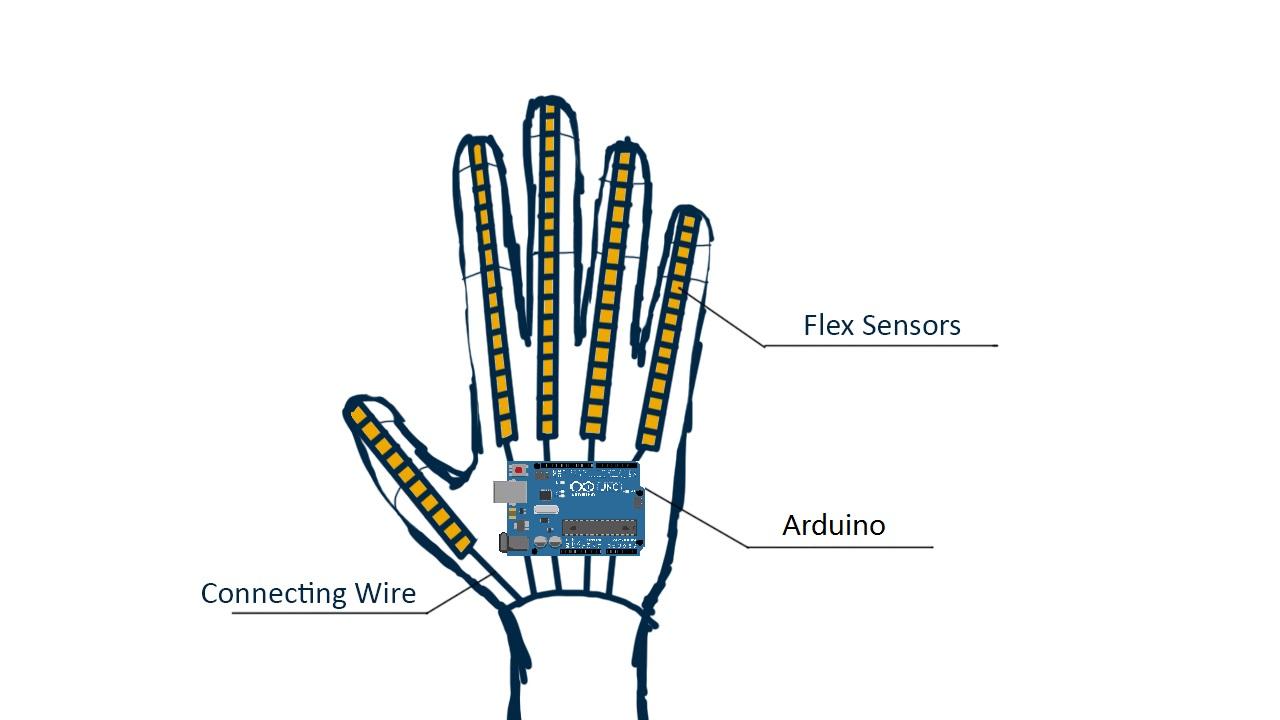
We chose this kind of sensors because when we use it to get angles which is a real angle that human finger bend. It will be accurate to capture the user hand motions.
Flex sensors have two different sizes, apply short ones on the thumb and little finger, attach longer ones
on other three fingers which are more fit for human fingers, and it will help to capture motions more accurately.
High flexibility and easy to use.

NRF24l01 is very cheap, only $1.99 each.
Low power supply- 3.3V.
Match Arduino perfectly.
Long range. The range will be over 100 meters.
High Frequency,2.4 GHz, so the transmit speed will be fast.
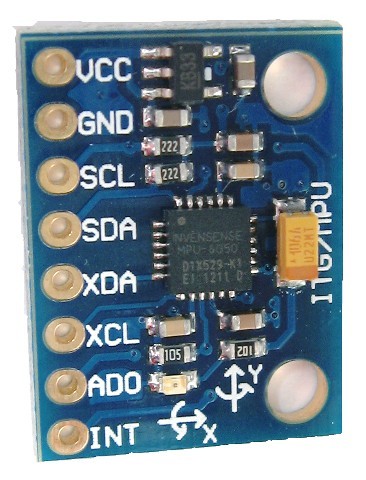
MPU6050 is a chip which combines both accelerometer and gyroscope. It has a 0.75x0.55 inches size, which is small and light enough to be placed on the human body. And the sensor range of the chip can reach 2000 degrees and 16g per seconds, which can fulfill the requirement for motion capture process.
There are many MPU6050 products available, which are compatible to Arduino platform. Also, many tutorials about this chip are available through the internet.
The price of this chip is about $5 per piece. It is much more cheaper than other available inertial measure unit sensors.