EOD Robot & Controller

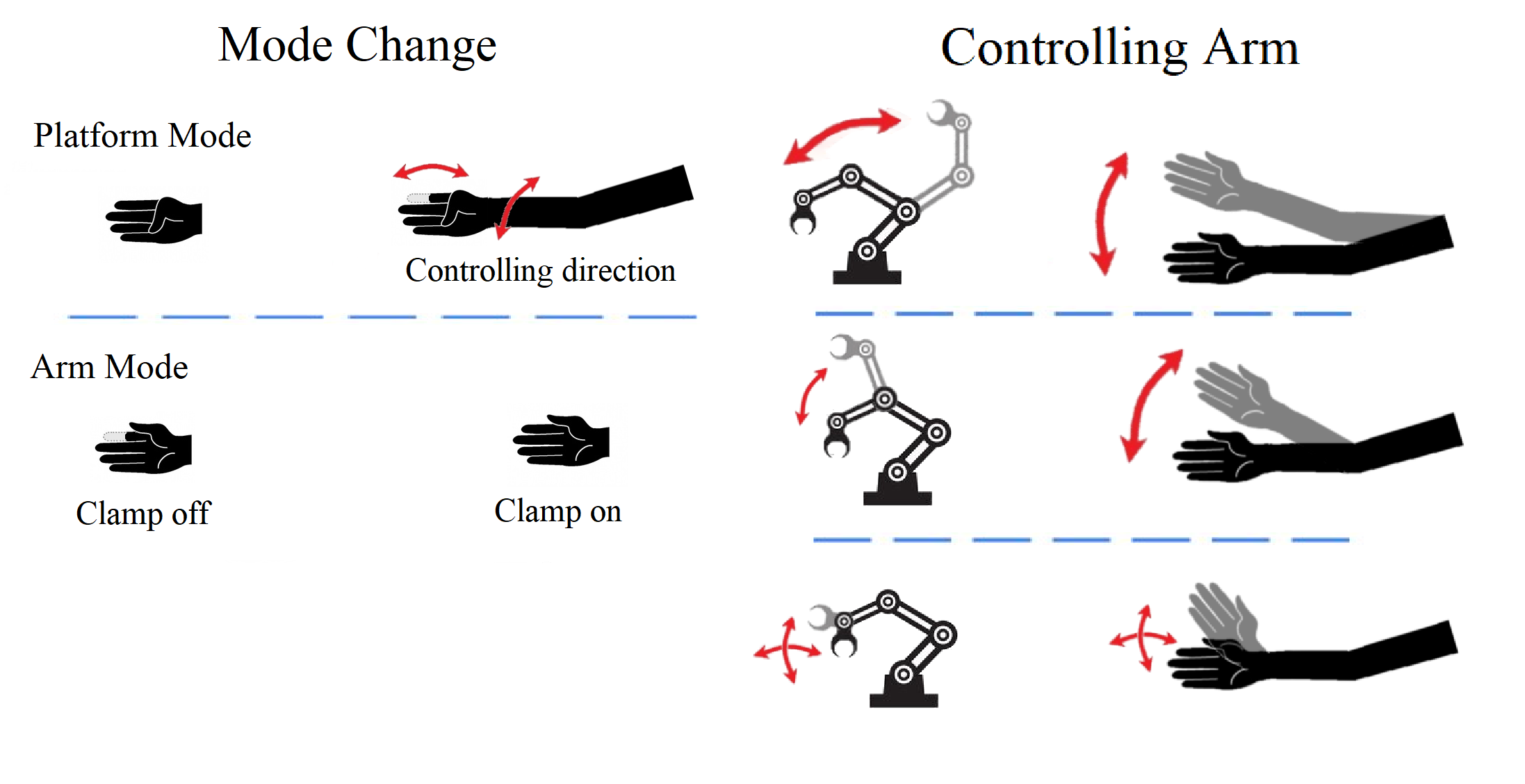
The robotic part contains a 6-axis robotic arm and one clamp, and it has a tracked-wheel platform to support the movement of the whole robot.
For the controller part, we have clamp controller and arm controller. The clamp controller has two flex sensors attached to the glove to record the bending angle of user's finger. And the arm controller contains three MPU6050 module which are separately fixed on the wrist, forearm, and upper-arm. All the sensors connect with one Arduino module to import data.
Between the controller and robotic part, out team use two NRF14l01 module to implement wireless communication between each other.