The Problem
Children with mobility issues are often confined to an electric wheelchair, and do not get to experience independent mobility - being able to move around on their own. Our client, Krista Branch, works with students in the Flagstaff Unified School District (FUSD), with the goal of helping them experience independent mobility. However, since each student comes with their own set of physical limitations, our client is hard-pressed to find budget-friendly solutions that can fit the needs of multiple students.
Our Objective
Our objective is to modify the existing platform provided to us by Dr. Winfree and a previous capstone team. The ideal solution will include multiple forms of driving inputs, such as joysticks and head switches. Our solution will also add ways to track data and performance over time, so that Branch can see areas that students struggle with or make progress in. These could include the number of times a child hits something with the platform, or the length of time they were able to successfully drive. We hope that our solution can be adaptable enough to continue expanding for the needs of more students.
Depiction and Diagram
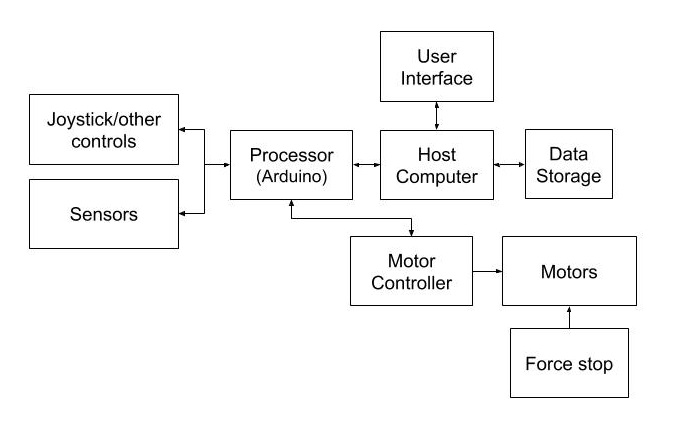
The main objective of the design is to create a final product that is adaptable for different needs. To accomplish this, we designated various subsystems that we believe to be crucial to the success of the project. Commands are sent from the client’s computer to the Arduino to dictate how the platform will be driven. The Arduino then processes the commands, and directs the motors to move according to the driving mode chosen. Data is collected by the sensors attached around the platform, and sent back to the Arduino to be processed. Calculations are done, and at the end of a driving session, data is recorded locally to the client’s PC.