Final Product
Hardware and Software Tools
Below is a list of hardware and software used to complete our project:
Power and Driving
- Wobble head switches
- 12V lead acid car battery
- Sabertooth 2x60 motor driver
- Arduino thumb joystick
- Twist and push stop switch for emergencies
Software and Interfacing
- Processing IDE
- Arduino IDE
- Fritzing
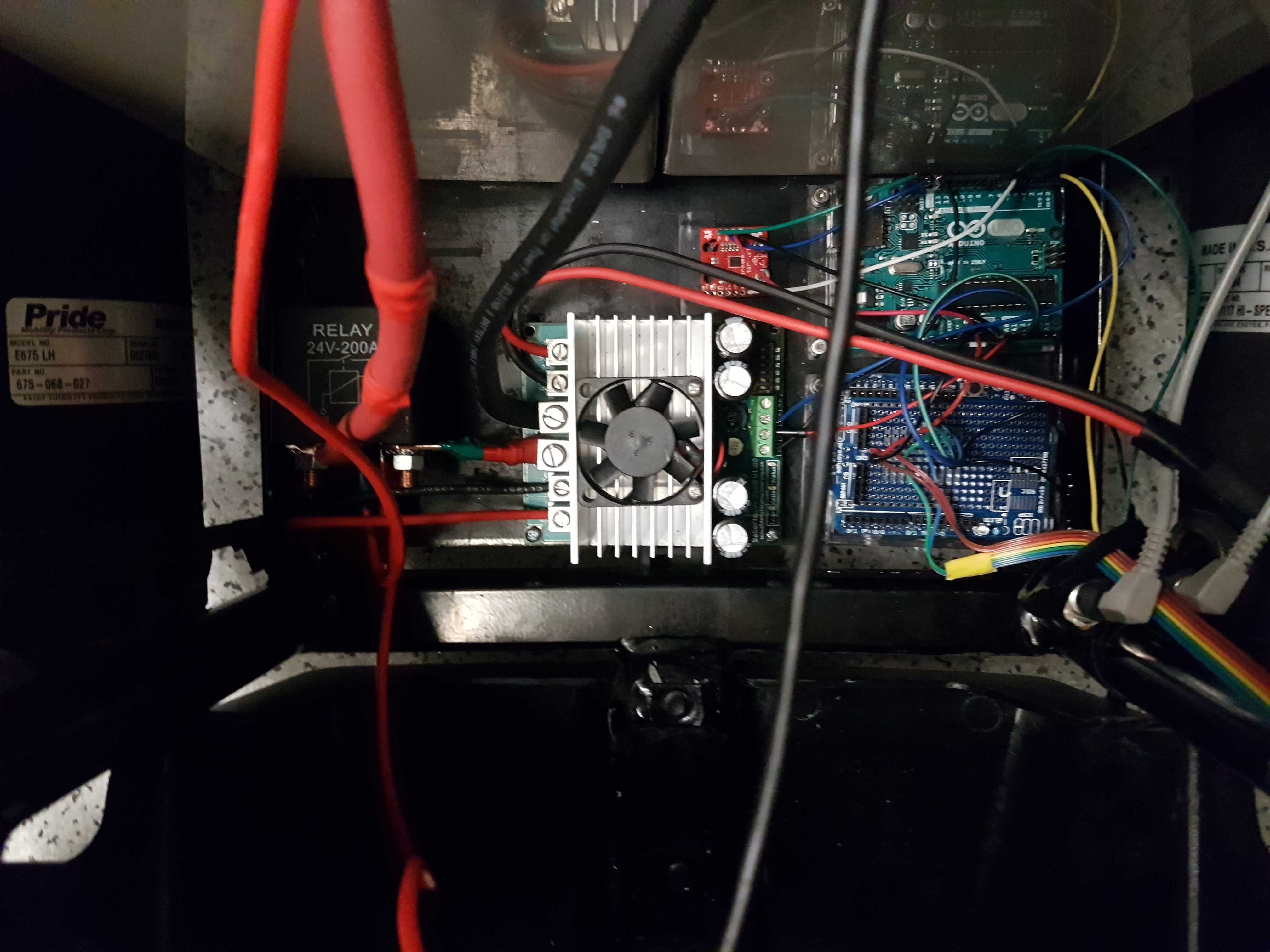
Controls and Sensing
- IR sensors
- Arduino Uno
- Arduino jumper wires
- USB-A to USB-C cable
- LSM9DS1 accelerometer
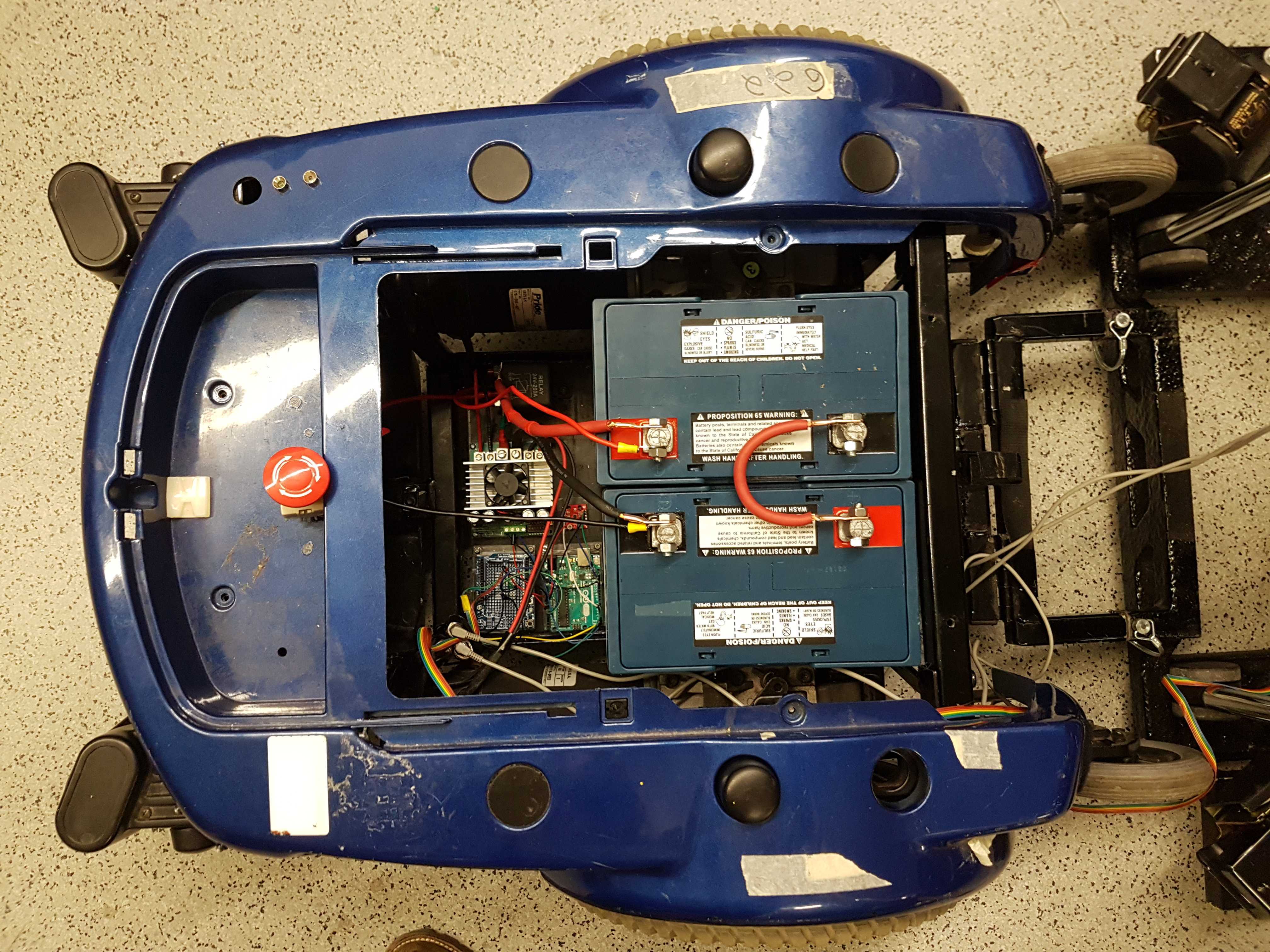
The Platform
Here is what our final product looks like:
Design Features
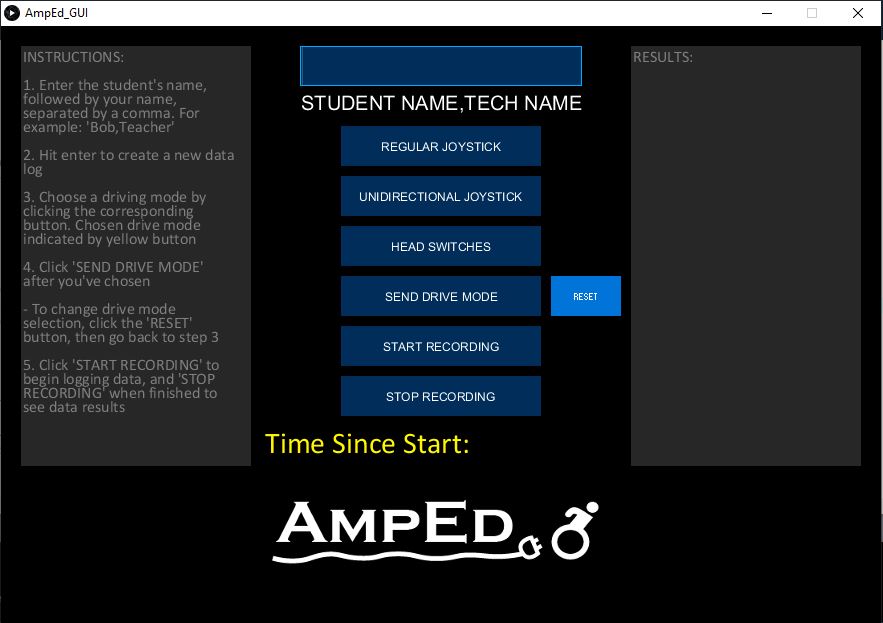
- A user-configurable joystick and head switches
- A client-side graphical user interface (GUI) that
allows you to adjust data collection parameters
and driving inputs
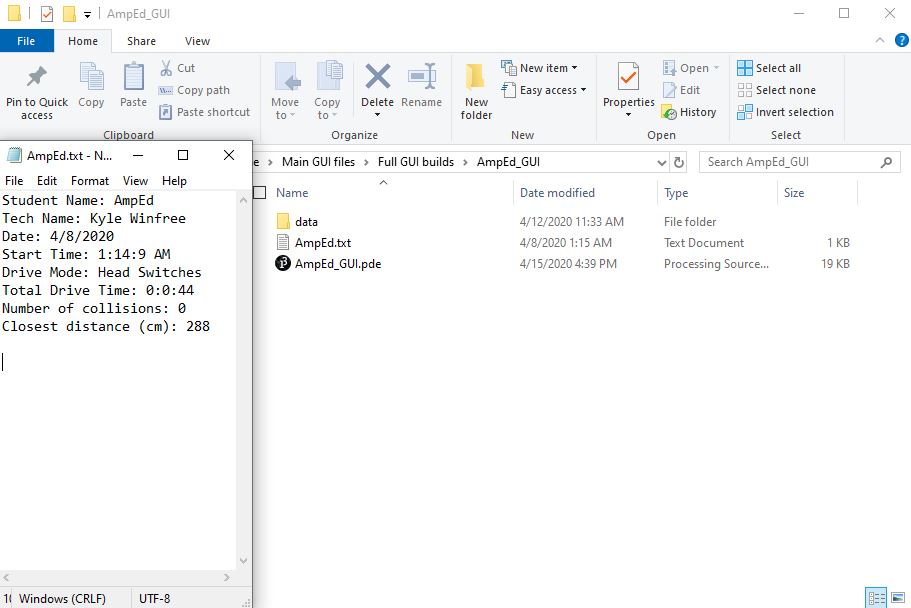
- Ability to collect several types of data
based on connected sensors
- Full driving capabilities: forward and reverse
motion, as well as smooth turning
- An emergency stop switch in case the
platform needs to be powered down
Benefits
- Allows students with mobility issues
to drive and experience independent mobility
- Provides a safe platform for them
to practice on, with modified controls
for easier usage and operation
- Smooth interface allows client to change
settings as needed without the need
to manipulate code or wiring
- Modular and adaptable, parts can easily
be upgraded or changed to meet the needs
of other students
Applications
- Students and therapists in FUSD can use
the platform with ease, as it is currently
housed in Dr. Winfree's lab
- Design can be adapted for future builds,
as it utilizes two 12V car batteries for increased
drive time, unlike other implementations
- Platform build can easily be reproduced
in other settings due to simpler design
and open-source coding
Resources
Looking for more information? Find our user manual, code, and final presentation below, or check out the documentation page.