Instrumented Bike+Share
Keep your safety on bike.

Updated on 5/9
Explore bumpy roads on your phones and watches.


On our campus and the surrounding roads, the degree of road damaging will be different every year. Traditionally, the department of transportation uses a huge detection car to detect road damage. Our client Dr. Ho finds that it was not only cumbersome, but also only applicable to motor vehicles, and it is expensive. Hence, the goal of our team is to finish the same function based on bikes. However, compared to the huge detection car, our devices have more advantages: it costs less, applies to any road, and is more portable.
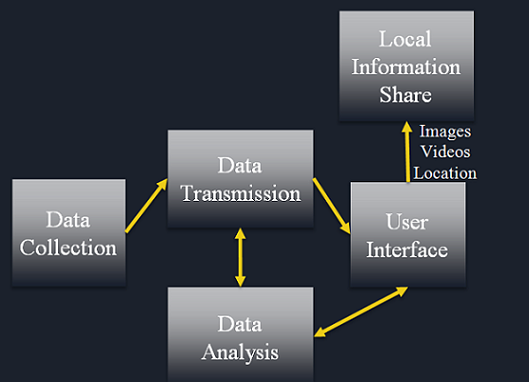
The basic components consist of a camera, an accelerometer, the Global Positioning System (GPS), the Android mobile application development, and data analysis. The accelerometers will save three-dimensional data, the camera will show real-time videos of the roads as a reference, and the GPS will record the location information of the bumps. As for the App, we determine to design one for the Android system with a humanized user interface.
In terms of the data sharing, we use Wi-Fi and wireless mesh network (WMN) to share the information with other users. Finally, our test routes mainly focus on bike lanes on campus, which helps us to amend our design scheme based on the results of each experiment.
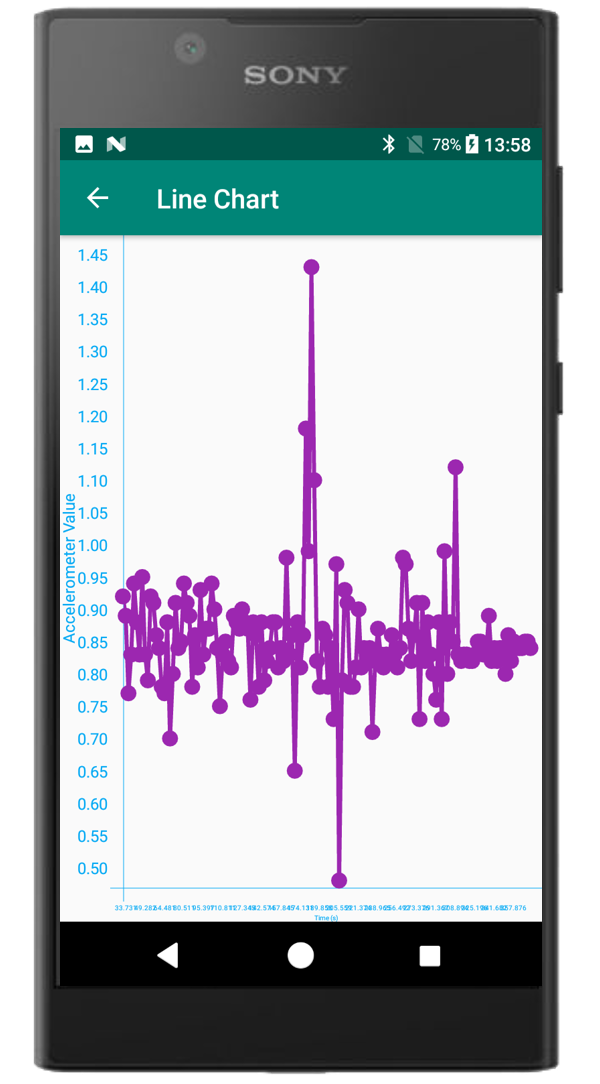






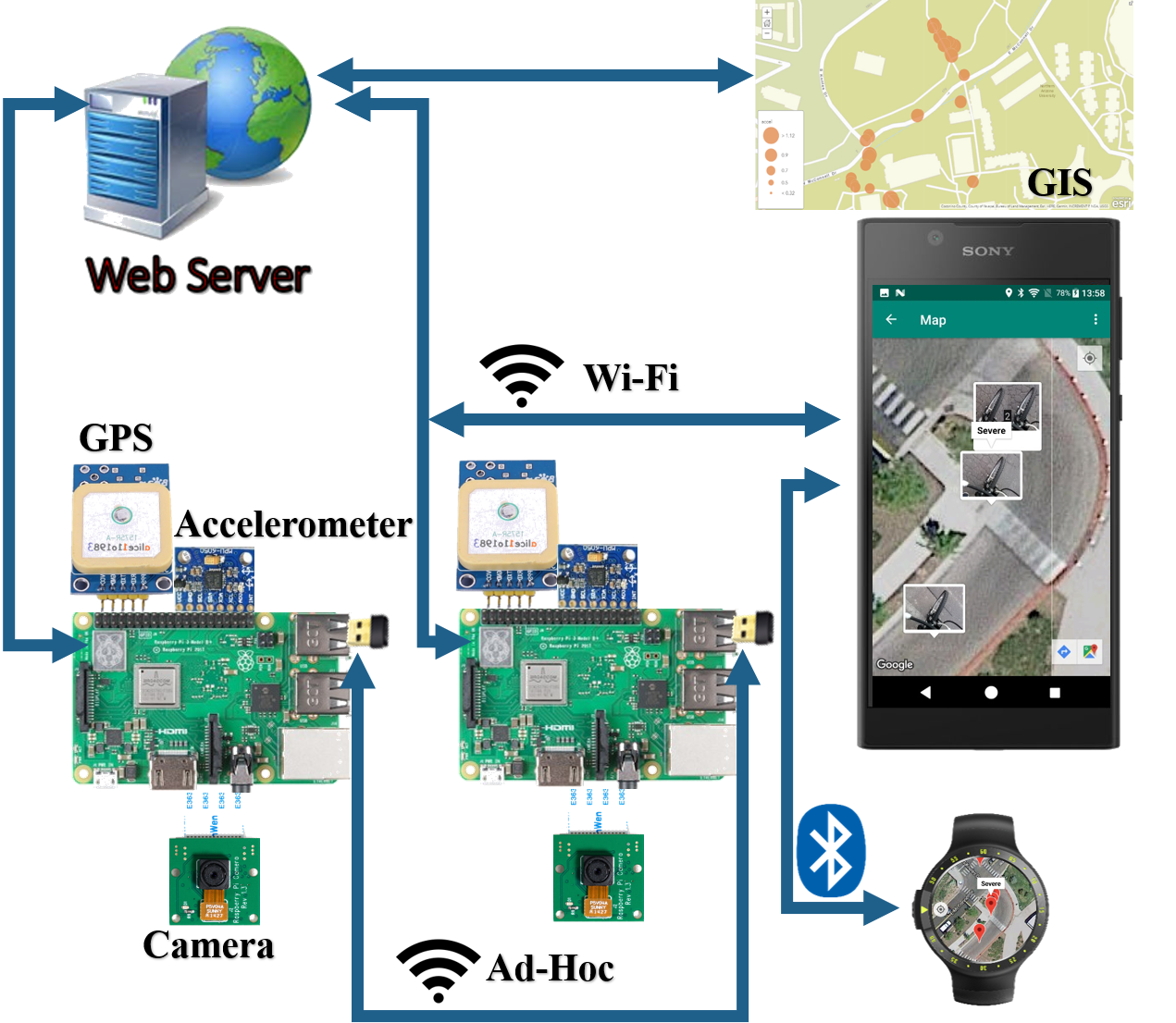
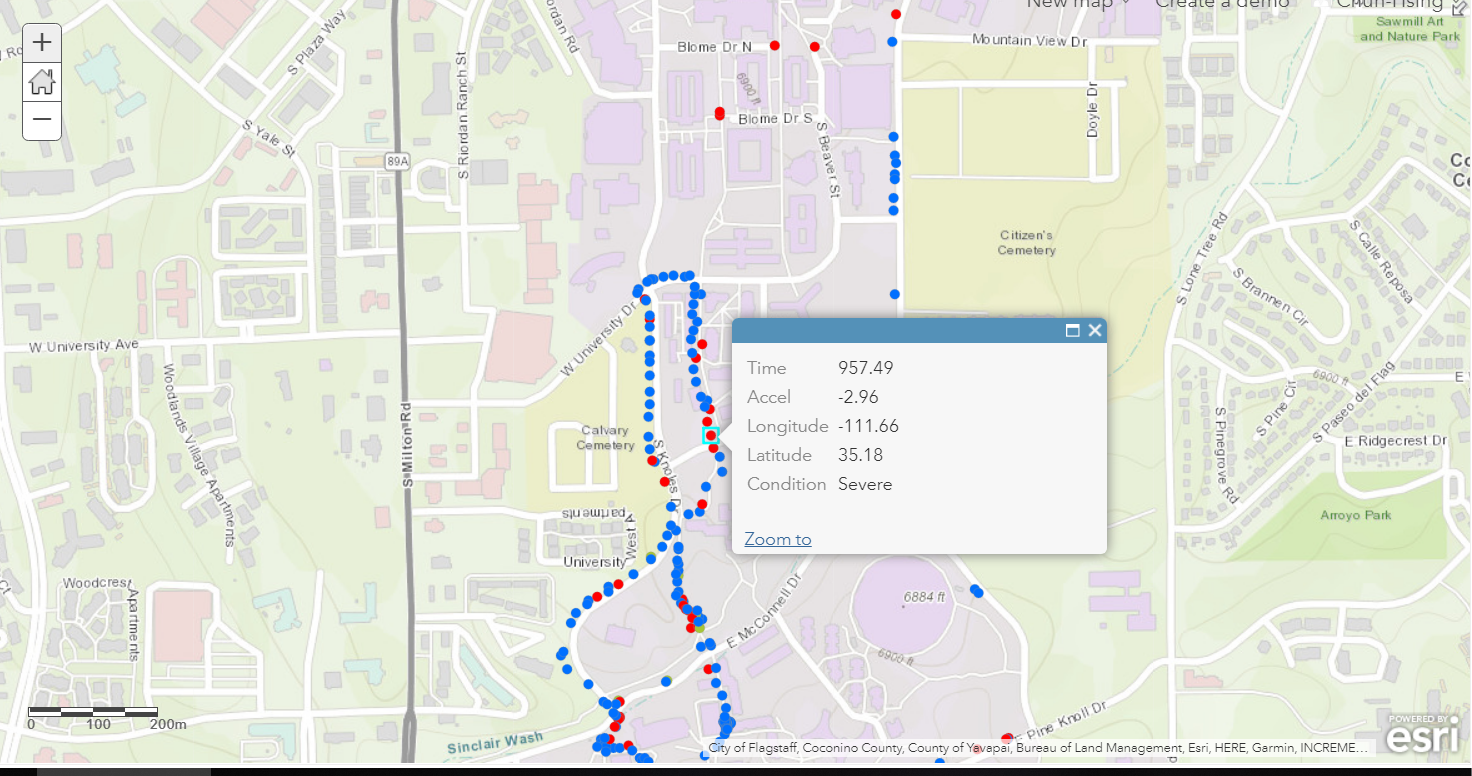
Our main microcontroller is the Raspberry Pi, which is used to control all the data collection modules, including a GPS module, a camera and an accelerometer to get fluctuation information. The onboard Wi-Fi module is used to build mesh as well as calculate and analyze the pictures about the road information. We use the changes of the accelerometer to determine whether the road is flat and set up the threshold value manually to tell the roughness of the road. In addition, the GPS is used to locate the position of the bumps on the lanes and helps the users to mark on the mobile phone or watch.
The mobile system is used to share the pavement information, including the road condition with pictures or videos, and some marked bump points. What’s more, we use a camera settled on the bike frame to record the road as a reference for users, which can be uploaded on our phone and watch.
According to the information collected on the phone, the users can determine whether they need to change another road for travel. Our main focus is to combine the data acquisition and processing part of the Raspberry Pi system with the user-oriented part of the Android system.
Guoyu Chen
Responsible for image processing and connections betweeen hardware and software.
Copyright © Bike Star Team
You can use this logo with our authorization.
This capstone project was accepted by our client Dr. Ho on May 7. (Updated on 5/9/2019)
Your feedback is our motivation of further developing. Please use the following information to contact us.