Implementation Overview
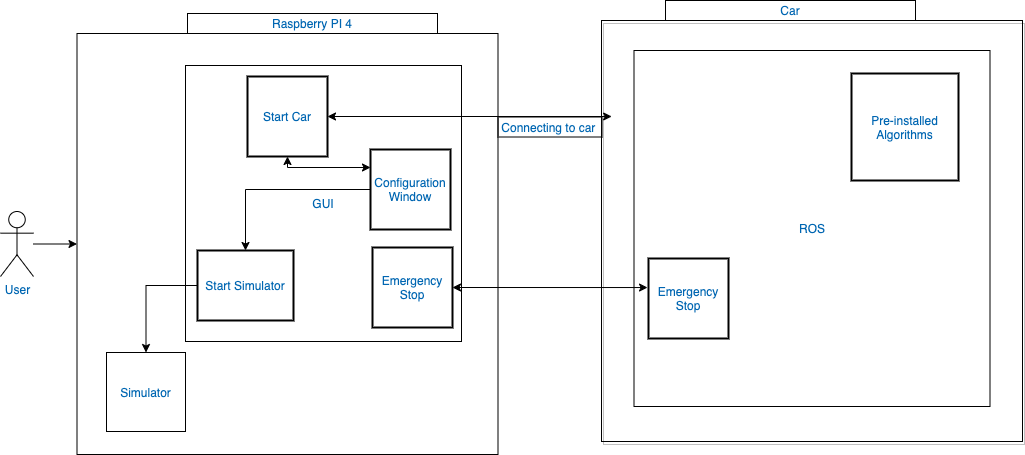
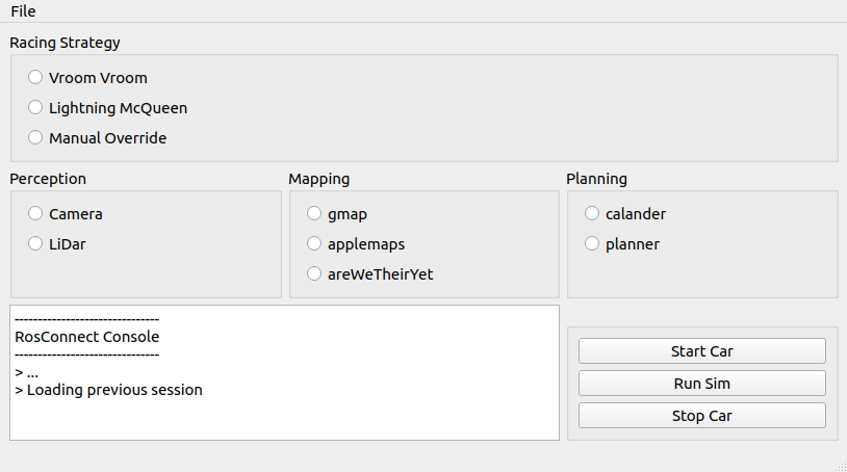
This is our implementation of how our system works. The user starts by interacting with the GUI. From there they select configuration options. After the user has the set configuration options they either select start car or start simulation. If they press the start car button a script sends all of the required files to the car. This also starts the car and starts the process of running it. There are two emergency stop mechanisms that we are installing. This is a stop car button on the GUI and a script on the car. This ensures that we are able to stop it if we lost connection.