Gallery
Here, you can view a collection of images of the drill arm itself in development. These will include images of the final product, the CAD models, the physical prototypes, the virtual prototypes, and demonstration videos of the physical final product in operation.
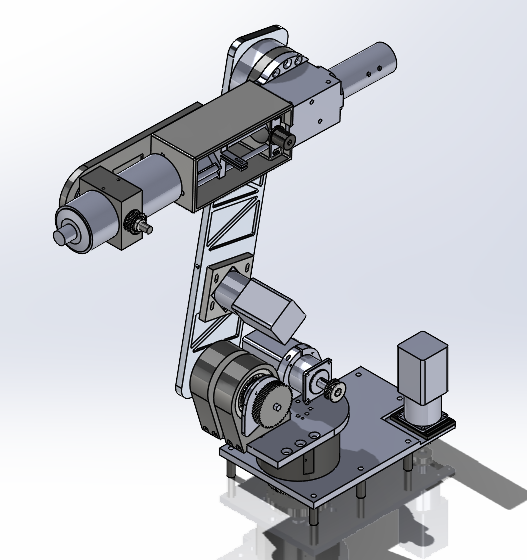
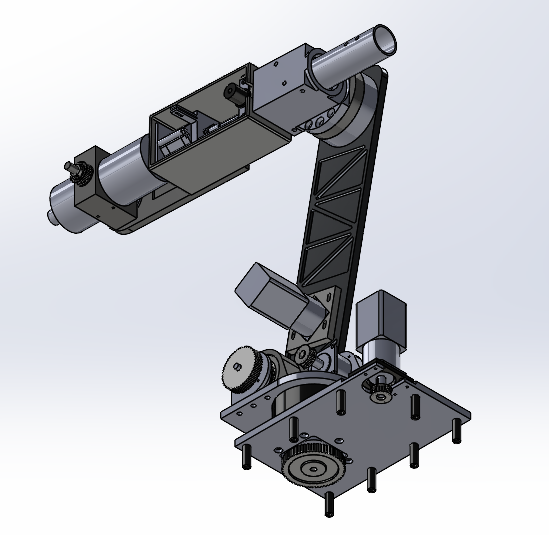
Final Model (Isometric View)
The team's final design iteration, which would reach physical product status.
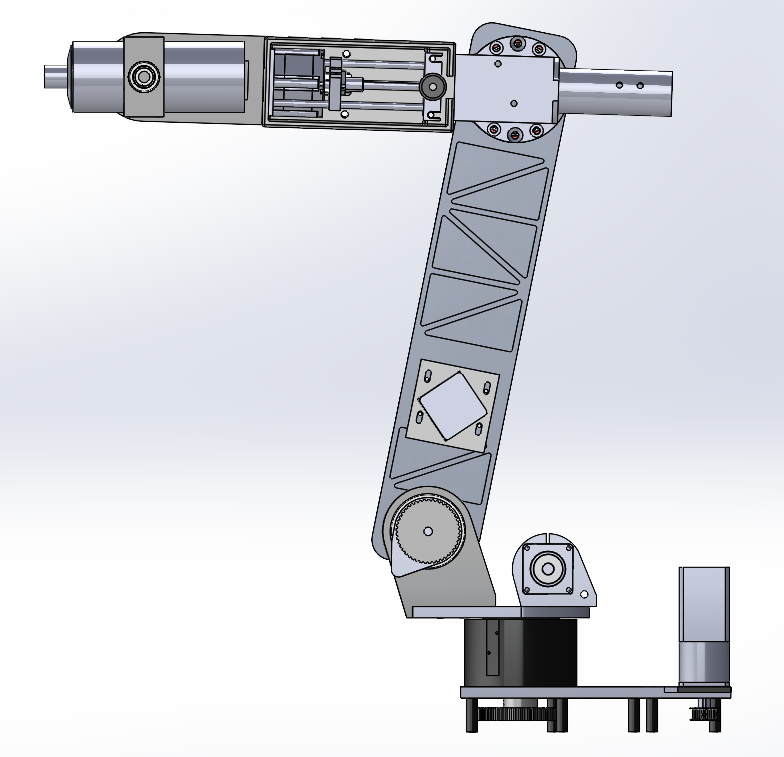
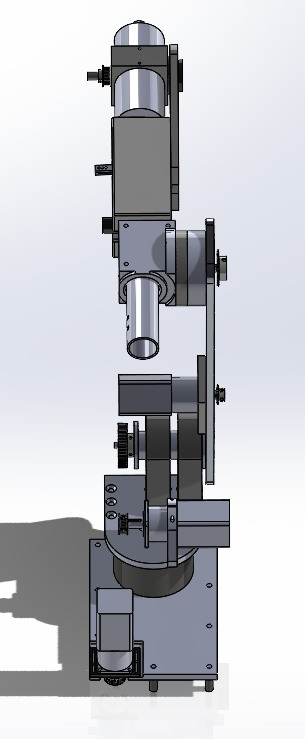
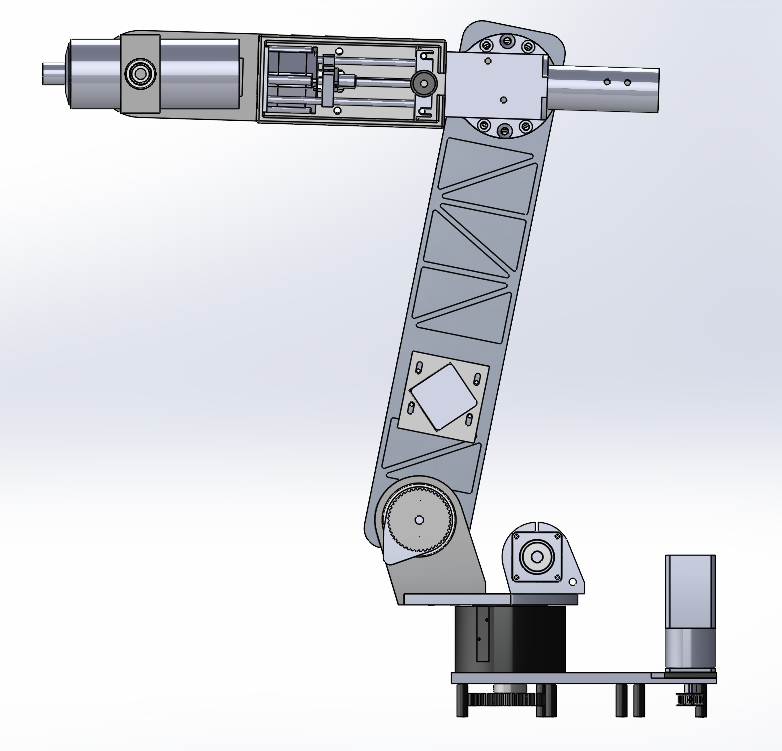
Final Model (Side View)
A side view of the team's final design iteration.
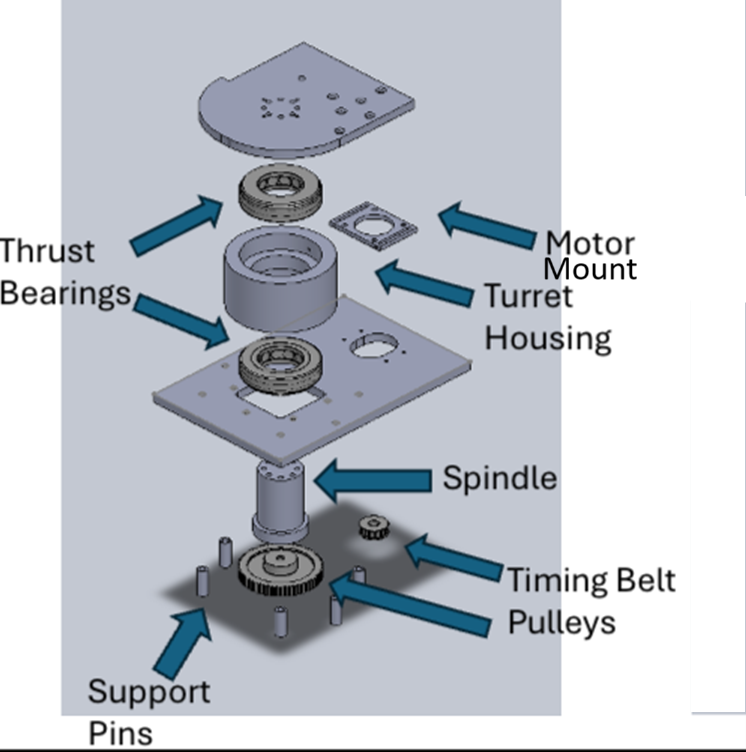
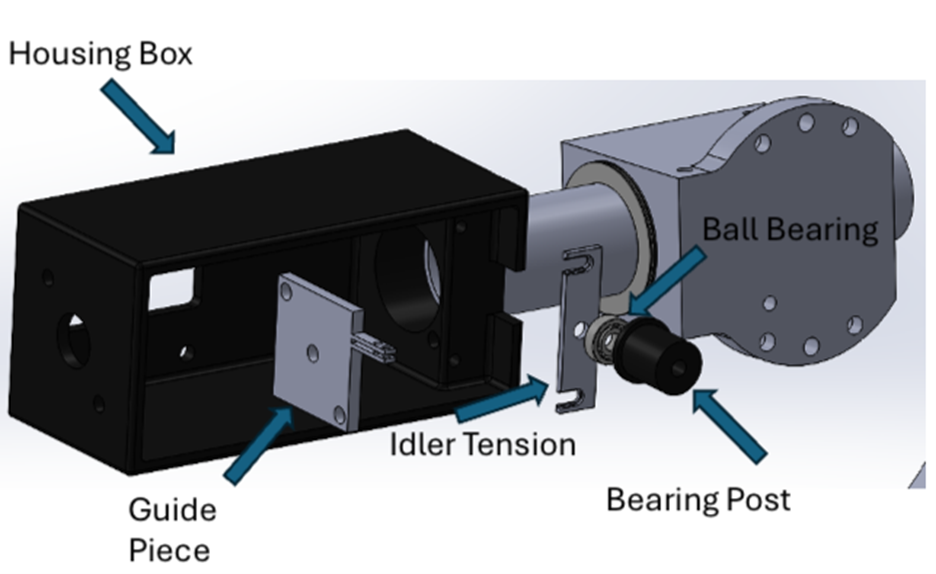
Joint 1
The first joint of the team's final product, displayed alongside part callouts.
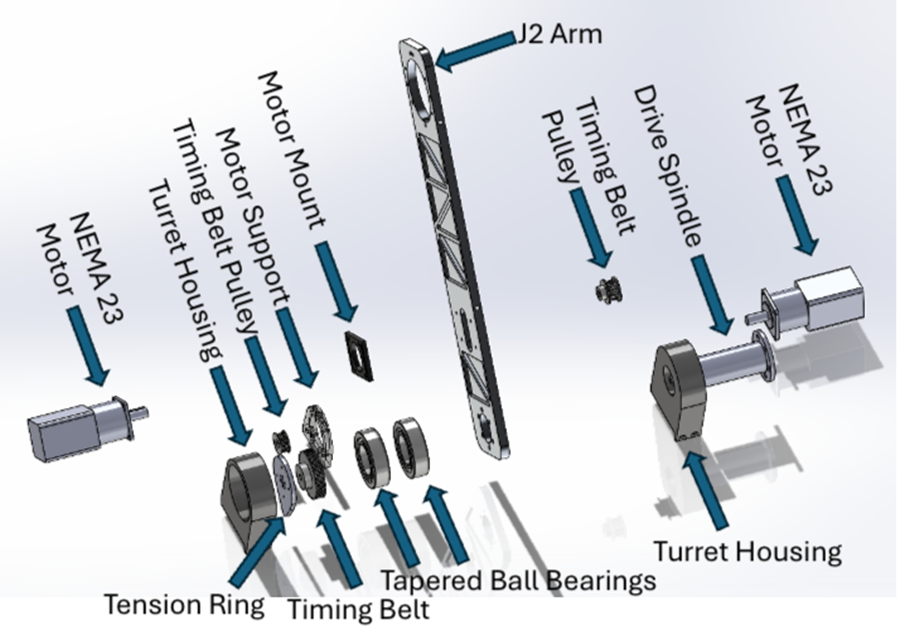
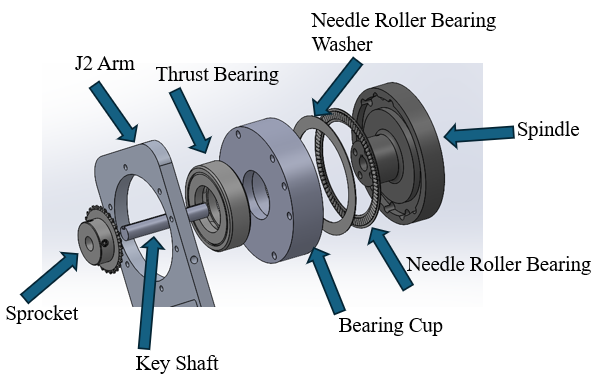
Joint 2
The second joint of the team's final product, displayed alongside part callouts.
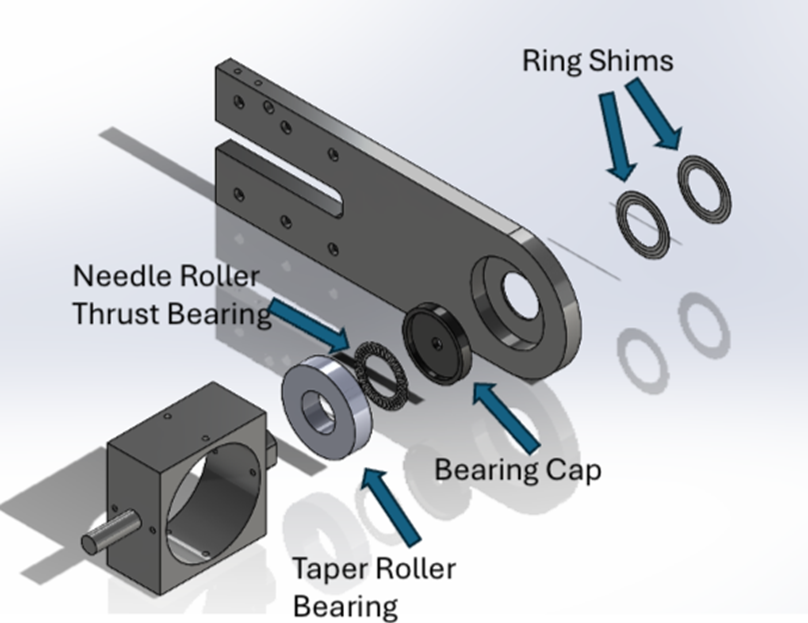
Joint 3
The third joint of the team's final product, displayed alongside part callouts.
Joint 4
The fourth joint of the team's final product, displayed alongside part callouts.
Joint 5
The fifth and final joint of the team's final product, displayed alongside part callouts.
Rear Assembly Photo
The team's final design iteration, shown from the upper rearside.
Rear Bottom Left Corner View
The team's final design, as viewed from the rear bottom left corner.
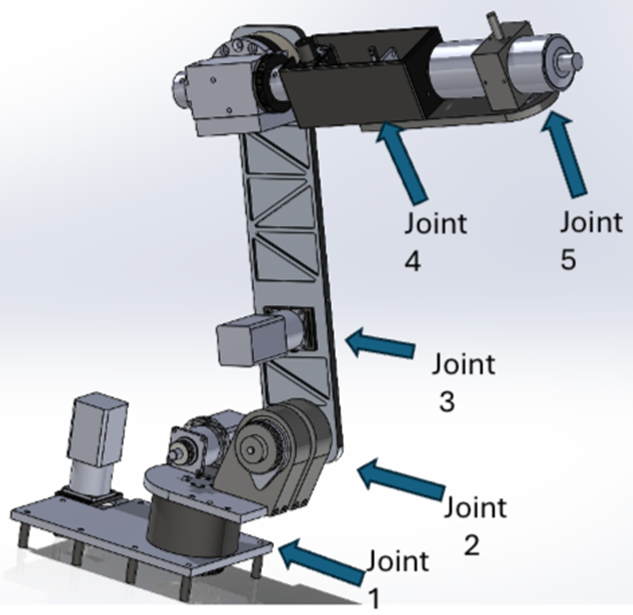
Assembly Photo
The team's final design iteration, shown with the location of each joint being pointed out.
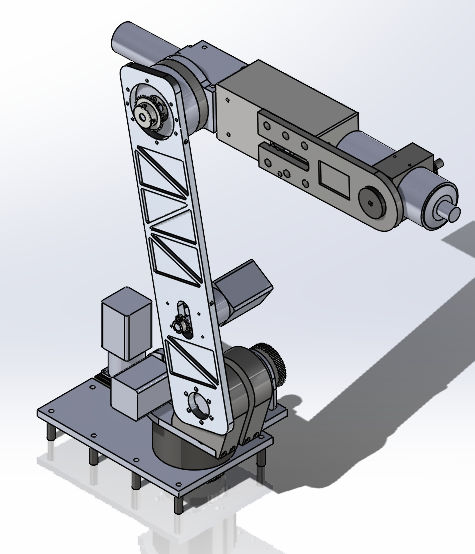
Upper Right Corner Assembly Photo
The team's final design iteration, shown from an upper righ perspective.
Left Side Assembly Photo
The team's final design iteration, shown from the left side perspective.

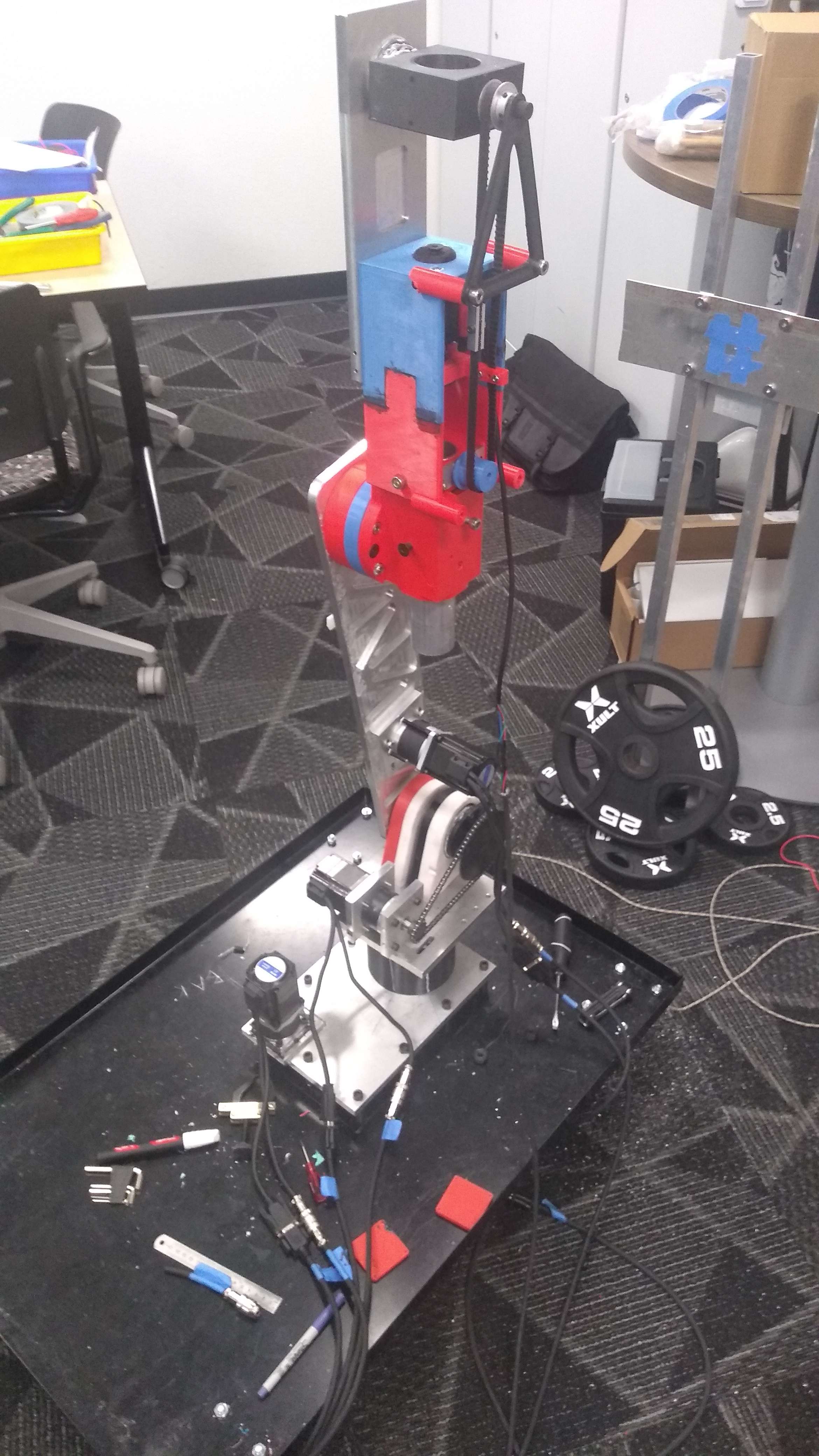
Physical Product Isometric Photo
The team's physical manufactured product, completed.

Joints 4 and 5 Assembly Photo
A close up of Joints 4 and 5 fully manufactured and assembled.
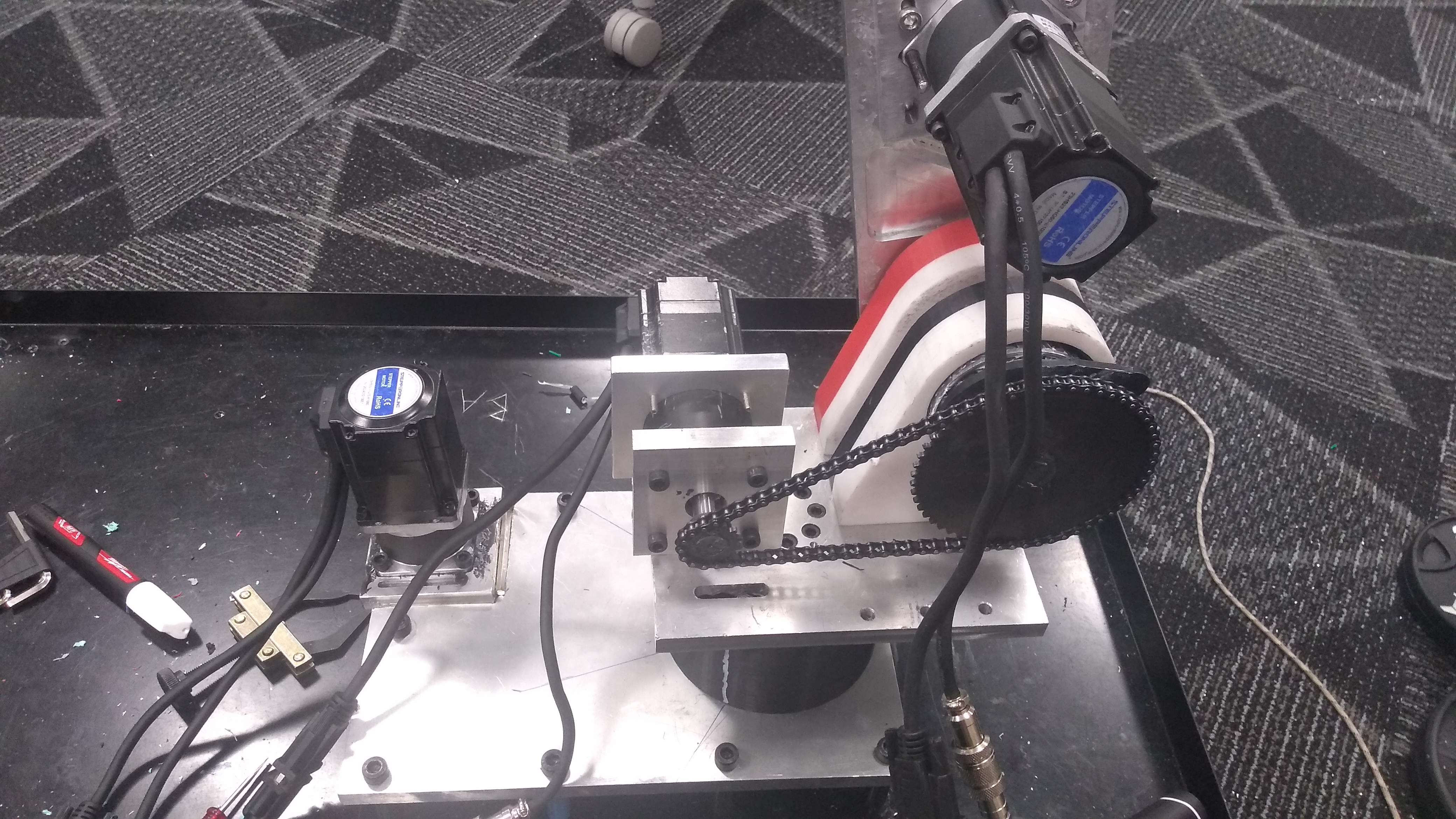
Joints 1, 2, and 3 Assembly Photo
A close up of Joints 1, 2, and 3 fully manufactured and assembled.
Full Assembly Photo
The fully assembled and manufactured product, viewed from the opposite side.
Arm Movement Operation Video
A video showing the robotic arm in full operation, displaying its capability to move without assistance.
Drilling Operation Video
A video displaying the robotic arm drilling through the aluminum plate.
Arm Positioning Video
A video displaying how the arm will move into position once commanded to do so by a human operator.
Drill Operation Video 2
Another video of the drill in operation. The plate being drilled through in the video is made out of aluminum.
.png)
Current Iteration (Isometric)
The team's current iteration of the prototype, from an isometric view.
.png)
Current Iteration (Bottom Front View)
The team's current iteration of the prototype, from a bottom front view.
.png)
Current Iteration (Rear)
A rear view of the team's current prototpye model.
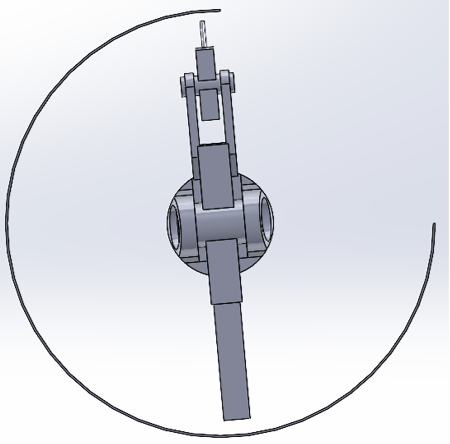
Second Iteration (Top View)
A top view of the team's second prototype, which was replaced by the current model.
.png)
Current Prototype Arduino
The team's current design iteration of the physical prototype's Arduino "brain".
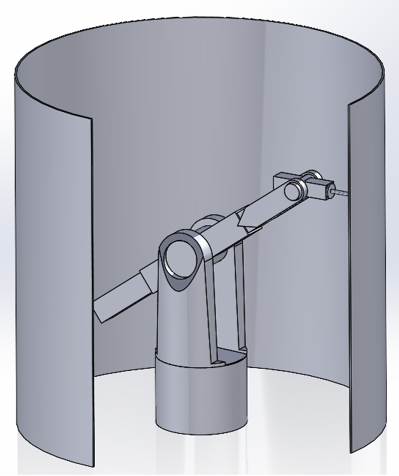
Second Iteration (Isometric)
The team's second design iteration, which eventually was replaced.