The Project
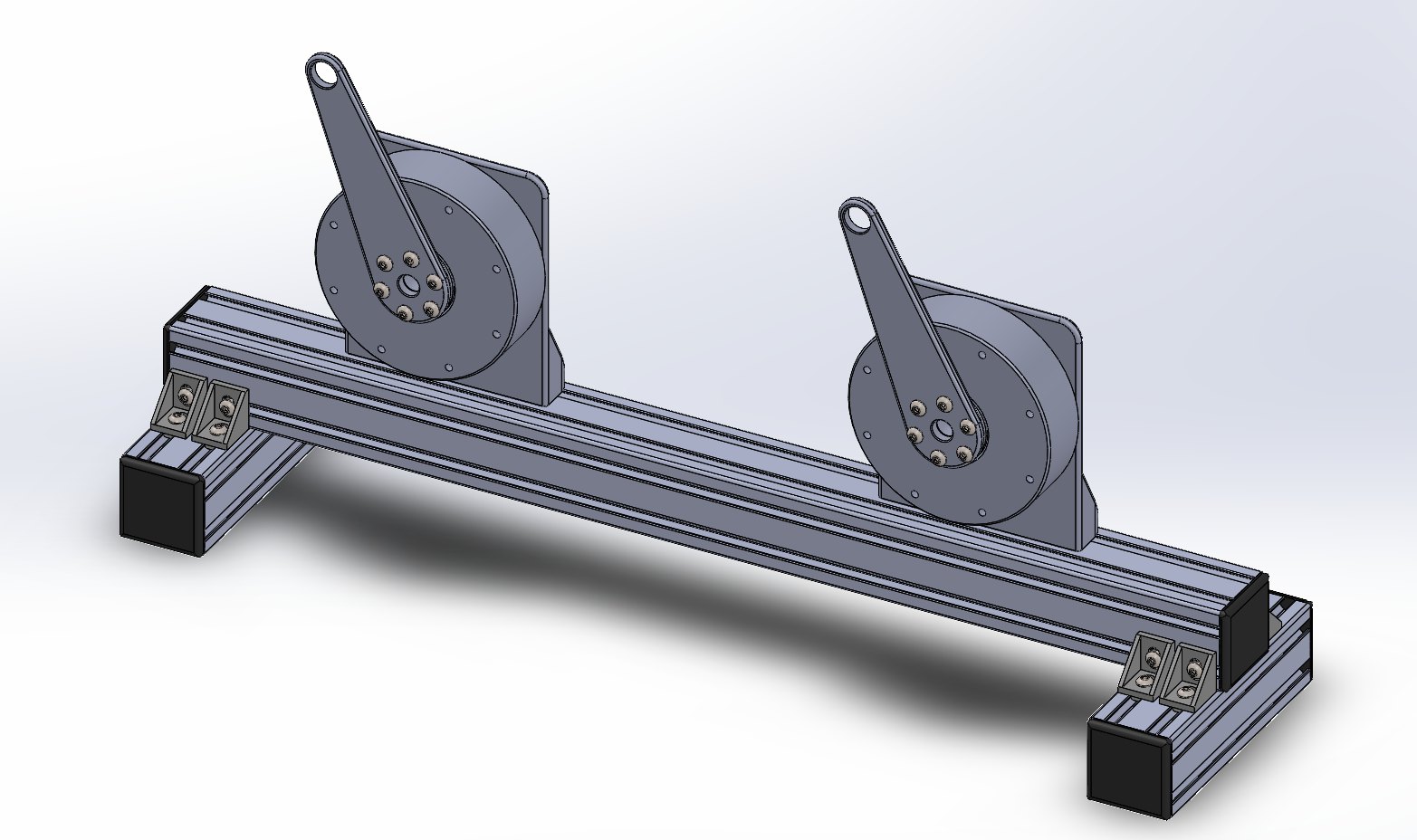
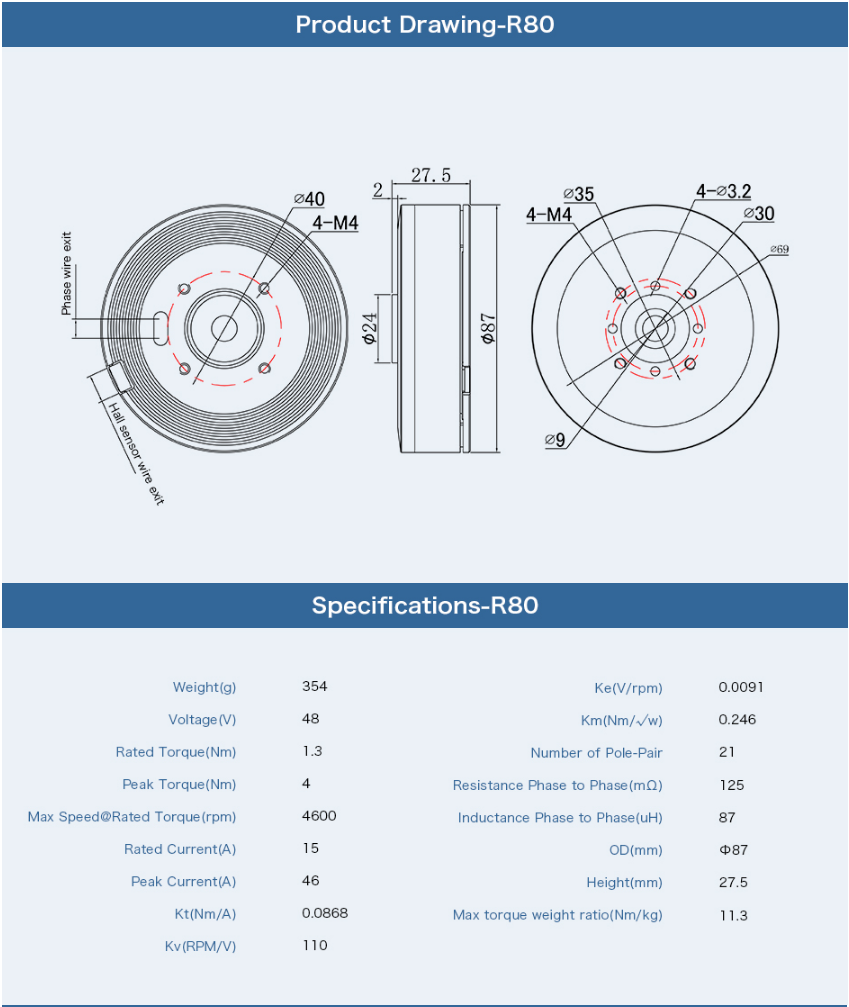
R8 KV110 motor brushless DC motor with the built-in hall sensor to overcome the effect of magnetic fluxes. The purpose of using this motor is to get the precise control of the rotor and the rotor can move smoothly and fast without posing any delays. The motor consists of a thin layer pad that reduces the heat dissipation as well. The torque produced by this motor lies in the range of 1.3 nm, but it can produce the peak torque of 4 Nm, that is quite high to move any kind of robot. This motor is used widely in robotics because of its easy operation with quick response and high precision. There are many reasons to use this motor which includes lightweight, minimum power consumption, high torque, small in size and it can control through the control quite easily. This motor comes with an MIT controller present in it and this can connect with the Arduino through the CAN-BUS. The PCB for the CAN-BUS with the Arduino can easily be designed, as the CAN-BUS needs to connect with the Arduino through a 4 pin connector and then uses the UART Band to communicate with the motor. The PCB for the Arduino to control the motor through the CAN but is a bit easy need only the CAN bus to connect with the input pins of the Arduino.
The motor can be used by the Arduino controller, as the motor contains a connector that can be used to connect with the Arduino and the Arduino will then connect with the computer. Where the commands can directly send from computer to the Arduino and Arduino will send those commands directly to the motor. Hence any changes can make in the control of motor like any stiffness value can use for the motor, damping ratio can change instantly, directions of the rotor can instantly select, the rotor can move with the steps and it moves to and fro etc. like everything can be done with this motor, it just needs to code the Arduino and set the speed, torque, stiffness, damping and other input values to operate the motor accordingly. These input values can upgrade instantly to change the motion of the motor. The update will affect the motor immediately and the motor will perform according to the new logic. The code in the Arduino can write with the Arduino syntax, and it just needs the logic to derive this motor as per the need. Another built-in function this motor contains is that it can detect the hurdle in the rotation and in case there is any hurdle present it will not keep pushing instead it will stop rotating or moving. Hence the motor can be used for collision detection as well.