Project Information
This page will discuss all relevant project information.
Project Description
Wildlife is tracked using Very High Frequency (VHF) telemetry tags. Traditionally, humans spend hours in nature triangulating signals coming from the tags on the wildlife. This process can be both time consuming and strenuous. The Dynamic and Active Systems Lab (DASL), led by Dr. Michael Shafer is currently developing an Unmanned Aerial Vehicle (UAV) with a Telonics RA-23K VHF antenna, to make the tracking of wildlife easier and more efficient. Rather than humans tracking through forests, a UAV can fly above tree lines to locate the source of a signal. However, the antenna is not able to properly receive data if a tag is below the UAV. Therefore, the D1 Capstone team is tasked with creating a gimbal system for the user to control the angle and position of the antenna while the quadcopter is in flight. The system must also be able to report the angle and readings of the antenna back to the user to ensure accurate and reliable data. The goal of this project is to make the collection of data faster, therefore allowing the user to be more productive in the tracking of animals. This system is of interest to the DASL because the ability to angle and rotate the antenna will remove the need for the UAV to pitch, ultimately making flight more stable. Creating a system that can pitch the antenna while the UAV remains stable will allow the user to receive more accurate data on the location of tags, even if a tag is directly below the UAV. Overall this will assist in resolving ecological research paradigms as wildlife tracking will be fast and efficient.
Project Constraints
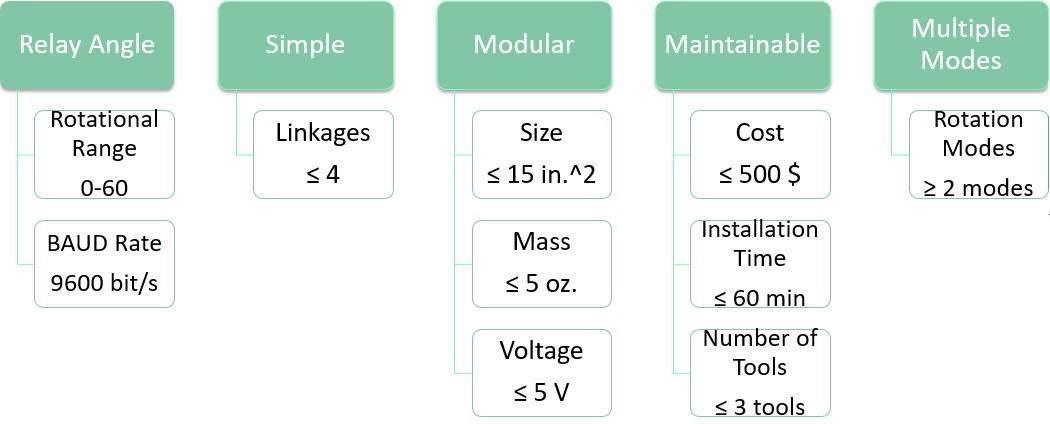
After gathering notes from the first meeting with the client, the team formulated five needs they deemed necessary for the project, which can be viewed in the figure below. From these five customer needs, along with additional specifications from the client, the team derived nine engineering requirements that their design must meet. Each of these requirements are shown below under the customer need they were derived from.
| Customer Needs | Engineering Requirements |
|---|---|
| Simple | Weight |
| Modular | Size |
| Multiple modes of movement | Serial Communication |
| Relay angle to user | Angle of travel |
| Maintainable | Power input |
| Cost | |
| Linkages | |
| Degrees of freedom | |
| Part installation time |
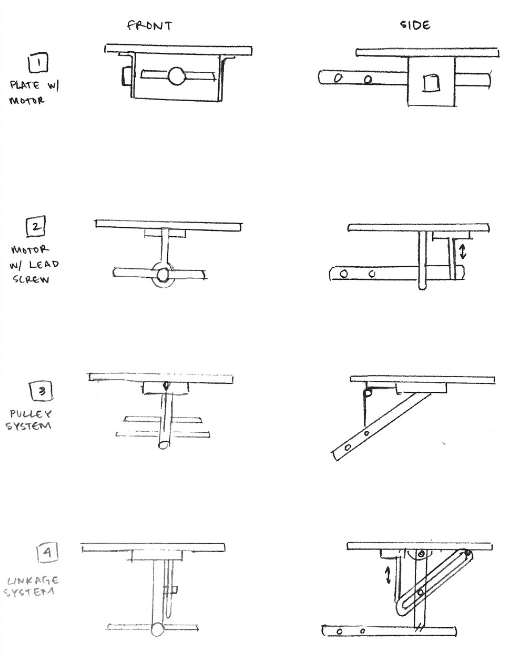
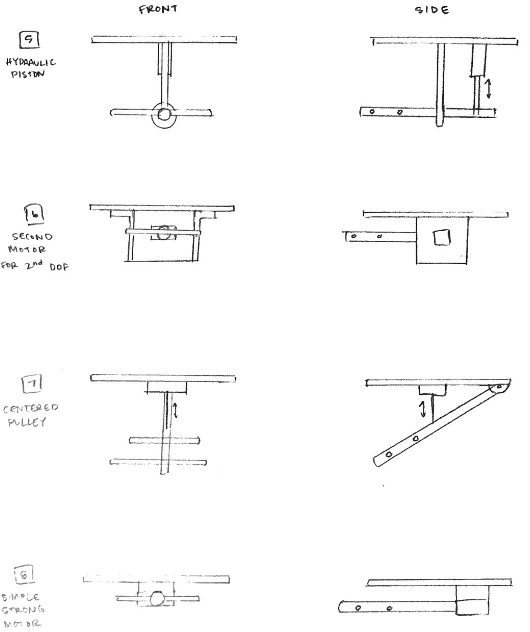
Designs Considered