Wildlife Telemetry Drone
Dr. Carol Chambers' explanation of locating tagged bats for her research reached the ears of Dr. Michael Shafer who thought to himself, "That's not efficient. I have a better idea." With that, a capstone project to build a drone to locate tagged bats by their signal-transmitting tags was born.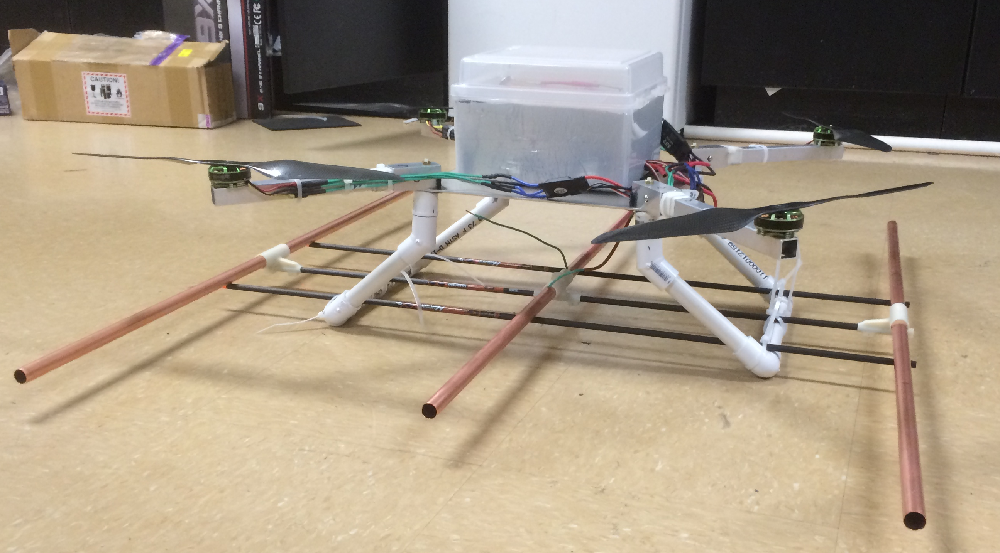 The design is a basic quadrotor layout carrying a three-element directional antenna and a controller,
a Raspberry Pi B+, for autonomous flight and communication with the flight controller. The final
build weighs in at approximately eight pounds and can maintain flight for twenty minutes.
The design is a basic quadrotor layout carrying a three-element directional antenna and a controller,
a Raspberry Pi B+, for autonomous flight and communication with the flight controller. The final
build weighs in at approximately eight pounds and can maintain flight for twenty minutes.
The team developing this consists of nine people in total, including six electrical engineering students and three mechanical engineering students. Tasks were divided into three categories: mechanical, avionics, and telemetry. The mechanical team is responsible for the physical aspects of the drone, avionics produces flight and control, and telemetry analyzes, filters, and locates the desired signal. Each category has its own subteam of three members which reports to the others weekly.
Requirements
|
Must take off and land vertically from the same point
Must fly a path of at least three kilometers Allows signal and direction data to be transferred to an external device Drone power circuit fuse must break after drone sustains a fall of five feet |
Must be simple enough for non-engineers to use
Must be easily backpackable Must withstand a drop from five feet Allows for manual override of autonomous flight systems Must comply with FCC and FAA regulations |