What are we doing?
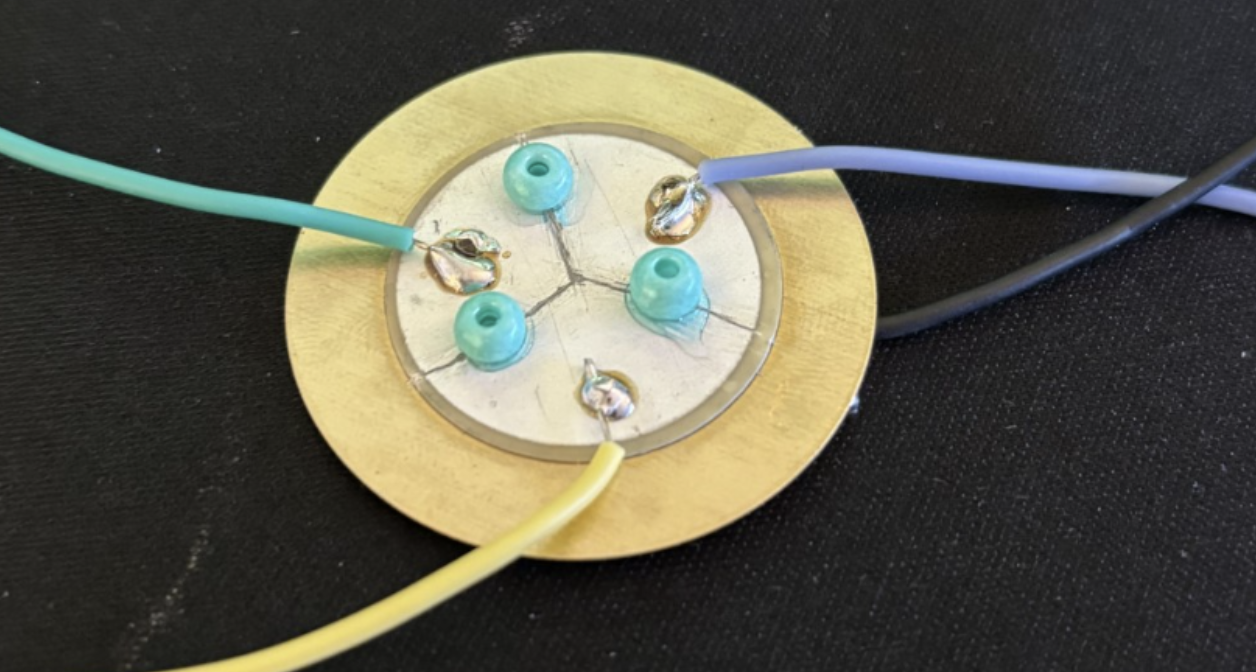
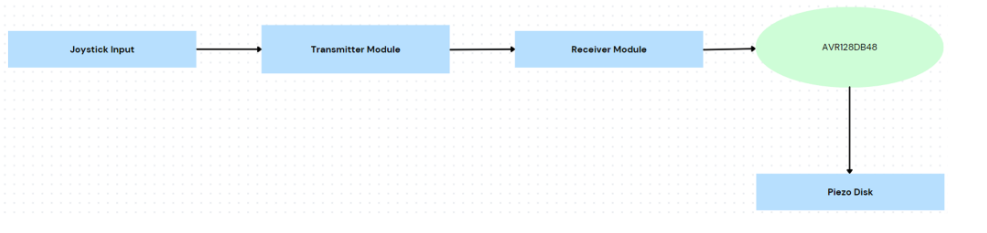
Our client, Dr. Carlo daCunha, challenged us to improve on the kilobot design, by using a piezo disk instead of a vibration motor. By using a piezo disk we can make the bot smaller and cheaper. Another important thing is that instead of using a vibration motor we can use less power when using a Piezo disk and because of how the disk functions we can use one disk per robot lowering the cost of the robot. Special thanks to our sponsor, for supplying us with an AVR 8-bit MCU provided by Microchip.
Idea of the Piezo Disk
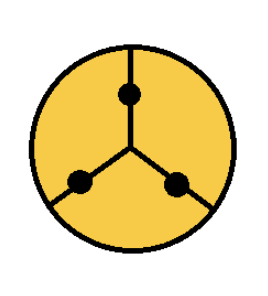
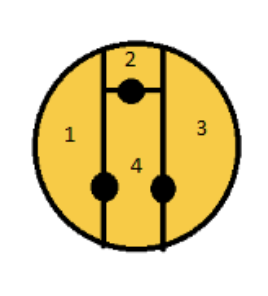
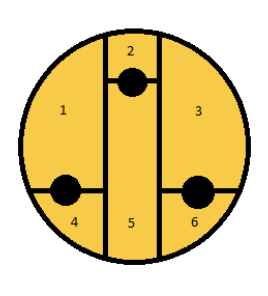
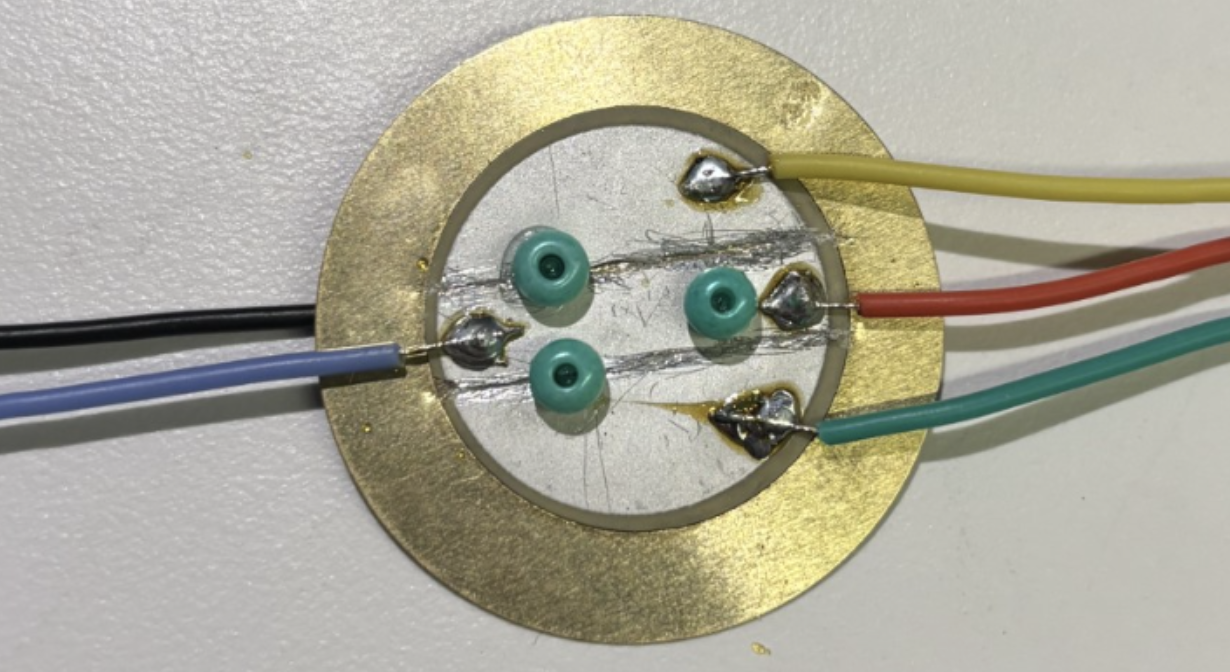
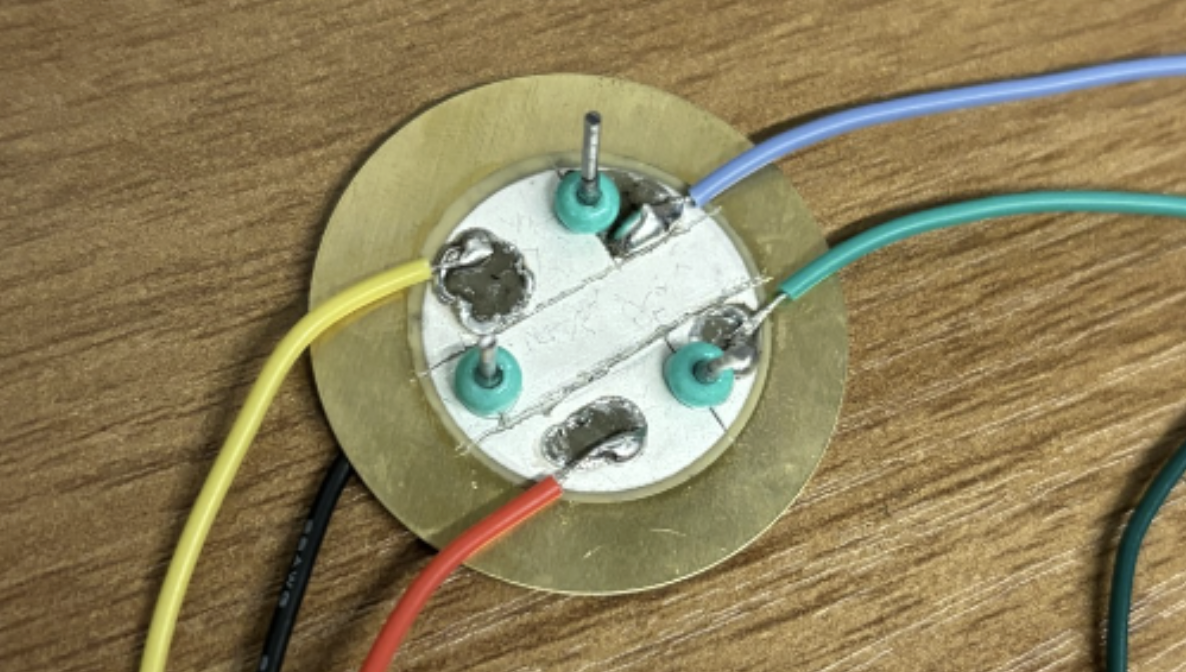
Looking at the image of the Piezo Disk we can see that there are 2 important parts of the Disk, the Piezo ceramic part, and the substrate. Knowing that we can cut the disk into different sections and within those parts we can apply different voltages causing the disk to flex in a motion that we can get the robot to move on an X-Y plane.
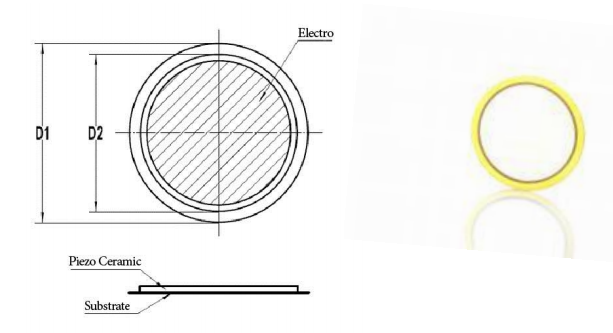
image source: PiezoDirect (https://piezodirect.com/piezo-disc-actuators/)
Sample text. Click to select the Text Element.