Our project is sponsored by Dr Fatemeh Afghah who is an assistant professor at Northern Arizona University (NAU). She is leading this project along with her Ph.D. student, Alireza Shamshoara. As a Senior IEEE member and the Director of Wireless Networking and Information Processing Laboratory, she will provide our design team with lab space and equipment necessary to complete the project. For more information about our client, refer to the links below.
Fatemeh Afghah
Assistant Professor
School of Informatics, Computing
and Cyber Systems (SICCS)
Director At Northern Arizona University
fatemeh.afghah@nau.edu
Alireza Shamshoara
Ph.D. Student in Informatics and Computing
At Northern Arizona University
as3874@nau.edu
Drone
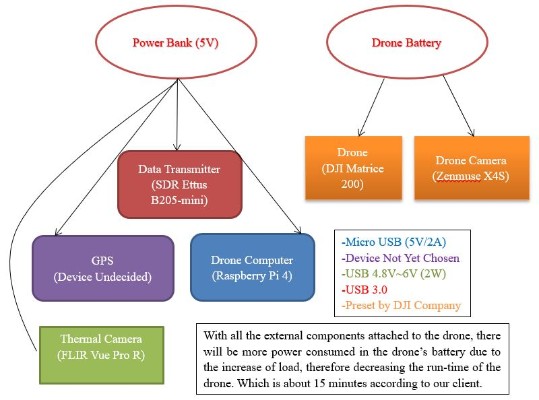
In the air, the drone will be manually deployed to monitor the fire. The drone system will simultaneously capture aerial images using both the drone camera and thermal camera. This will be accomplished through an interface between the two cameras and a Raspberry Pi 4 (?) microcomputer. In addition, a Global Positioning System (GPS) will be utilized to provide the location of the fire. Data transmission of the location, images of the fire as well as the time and date will occur using an interface between the Raspberry Pi 4 (?) and SDR Ettus B205-Mini transmitter.
Ground Station
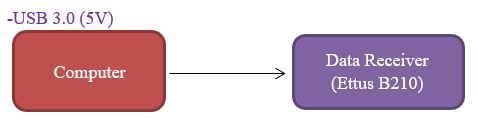
Data of the fire images, location, date, and time will be received from the drone using a system interface between a ground computer (personal computer) and SDR Ettus B210 Receiver. The data will be processed and displayed using a graphical user interface. The information displayed will depend on user selection. The system includes a user friendly interface that enables the user to select between two viewing modes. Mode one selects video streaming of several images in real time. Mode two displays the location of the drone on a map.
Data Connection
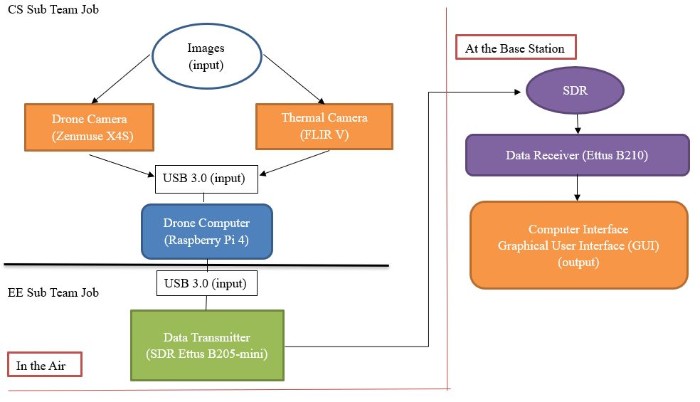
In the air, our Electrical Engineering team will be responsible for implementing a wireless communication system that simultaneously transmits aerial images using an interface between the two cameras and Raspberry Pi 4. The Computer Science Subteam will process the data. At the base station, our design team will utilize SDR Ettus B210 Receiver to receive data and display relevant information using a computer interface.
Benefits and Applications of Our Project:
This system provides many benefits to users. It may be used as a surveillance system to monitor wildfires providing an abundance of information about the weather, temperature and GPS location and images of the fire. It also may be used for other types of aerial object detection applications detecting other objects such as humans who may be in danger of the fire.
Project Design Depiction
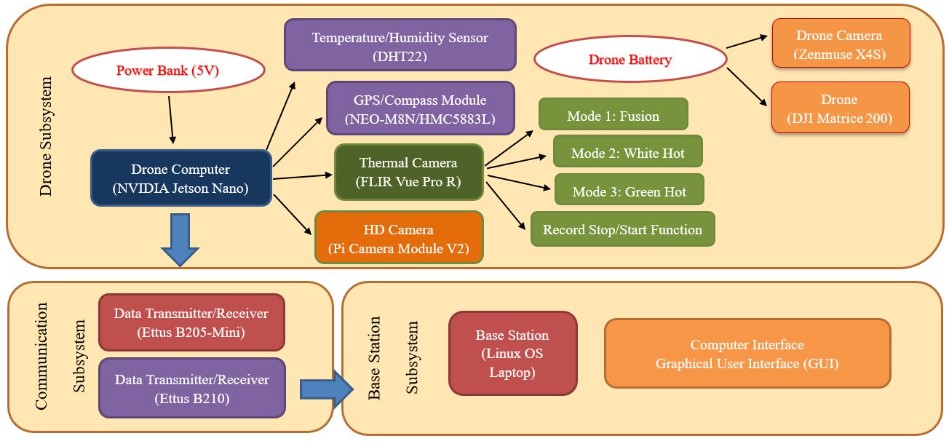
Our project consists of three subsystems that interface with one another to perform the functions of a wildfire drone. In the figure above, we have outlined each subsystem with their own labels as well as their contents: drone, communication, and base station subsystems. In the drone subsystems we will be using a microcomputer, in our case the NVIDIA Jetson Nano, affixed to a drone aircraft. The Jetson Nano will be the main component for processing images and data from the cameras and the sensors. With the processed information we are then using the communication subsystem to transfer that data from the drone to the base station for operators. The communication subsystem is made up of two devices from Ettus, the B205-Mini and the B210, both of which are attached to the drone and the base station respectively. With the communication subsystem established, we are able to have the interaction between the drone and the base station where we can view the information coming from the drone using a Graphical User Interface (GUI).