| Design |
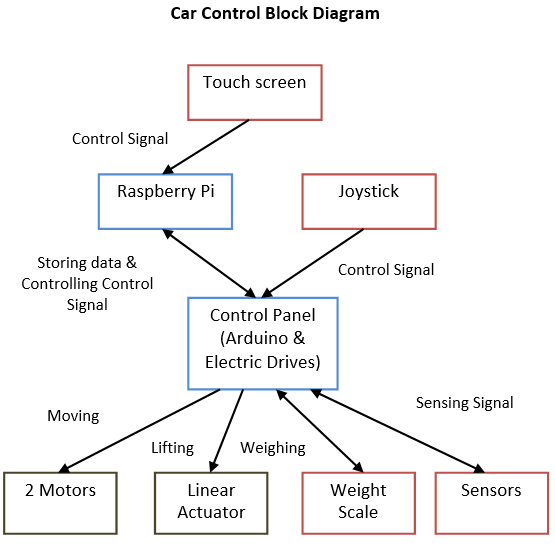
| System Diagram |
The joystick is the systems center and offers the user 2 choices. The first choice is to use the joystick in “normal drive mode. In this mode, the BabyLift is disabled and the car functions as a normal car. The sensors will read data and send to the Raspberry Pi to display the relevant information in a graph type format using a python GUI. This information will be used to analyze how to customize the cars rehabilitative properties. The rotary switches will be used to adjust the settings.
The second “BabyLift” choice is made by pressing the red button and registering a weight greater than the adjustable preset “trigger weight” to activate the BabyLift. The trigger weight value will be a percentage of the user’s weight and will vary with each user. The correct “trigger weight” settings is an important step in this process as it acts as a metric for “standing effort”. The fundamental idea behind the BabyLift is rewarding and encouraging the user for trying to stand. Increasing the trigger weight as the user gets stronger will challenge them and exert more pressure on their legs. The lift can be lowered into the sitting position with the joystick or control knobs. The sensors will record and store data in a similar fashion described in the “Normal” mode.
Last Updated: 4/7/16