
Biomech Hip Exo Home
Project Summary
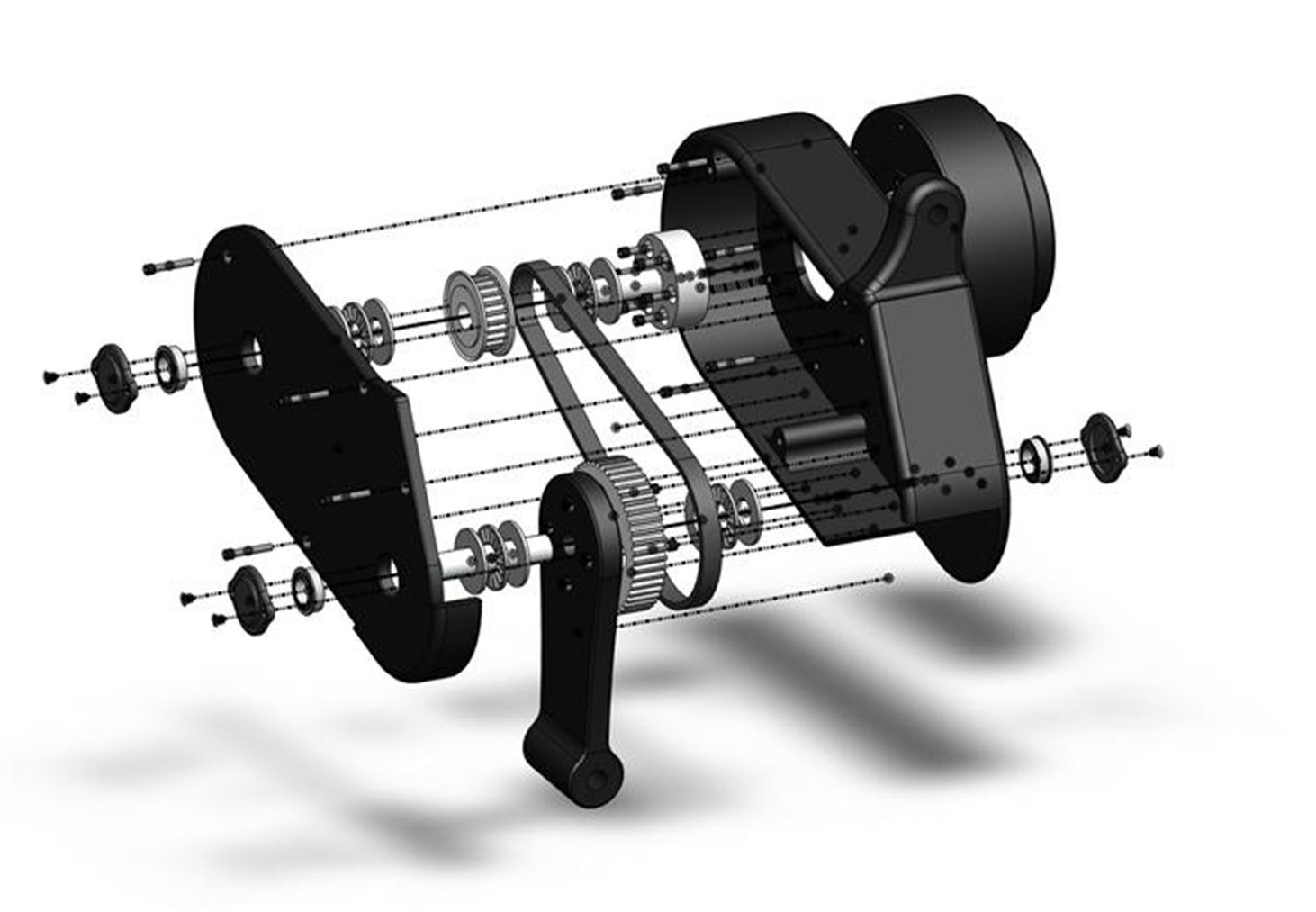
For the last year, our Northern Arizona University Bio-Mech capstone team worked to design a new powered hip exoskeleton to assist those with walking disabilities. Our original task was to redesign a previous version of the Biomechatronic lab’s hip exoskeleton. The old exo consisted of a cable-driven mechanical system that did not provide the power or functionality desired. Our new model utilizes a more powerful belt-driven system with automated immediate response capabilities, while maintaining an ultra-lightweight and minimal protrusion design. The exoskeleton is designed around two compact high powered motors each connected gears that transmit torque to the legs.
The main purpose of this device is to assist/rehabilitate patients with Cerebral Palsy (CP), or other conditions that affect walking ability. Physical training with this device is used to help patients walk more efficiently and increase motor skills. Individuals with CP have proven to experience much higher rates of energy consumption while walking. This device will reduce the amount of energy required by sensing the user’s motion and providing torque in the direction of movement. Reducing energy consumption by training with an automated exoskeleton has proven to have many benefits for users.

Acknowledgements



We would like to thank our sponsor Dr. Zachary Lerner and the Biomechatronics lab for their contributions to our capstone project. Visit the NAU Biomechatronics Lab for more biomedical engineering innovation.
A huge thank you to W.L. Gore for funding our project!
Also a special thanks to our technical advisor, Dr. David Willy David.Willy@nau.edu. We are so grateful for all of your advice, technical engineering knowledge, and wisdom during this project.
Meet Our Team
Jeffery Yows
Log. & Mfg. Manager
jsy34@nau.edu

Kyle Shough
Financial Manager
kas954@nau.edu

Nathan Stewart
Project Manager
nrs269@nau.edu

Sharon Toenjes
Test Engineer
srt289@nau.edu

Daniel Colley
CAD Engineer
dtc78@nau.edu

Last updated April 29th, 2022