

Project Description
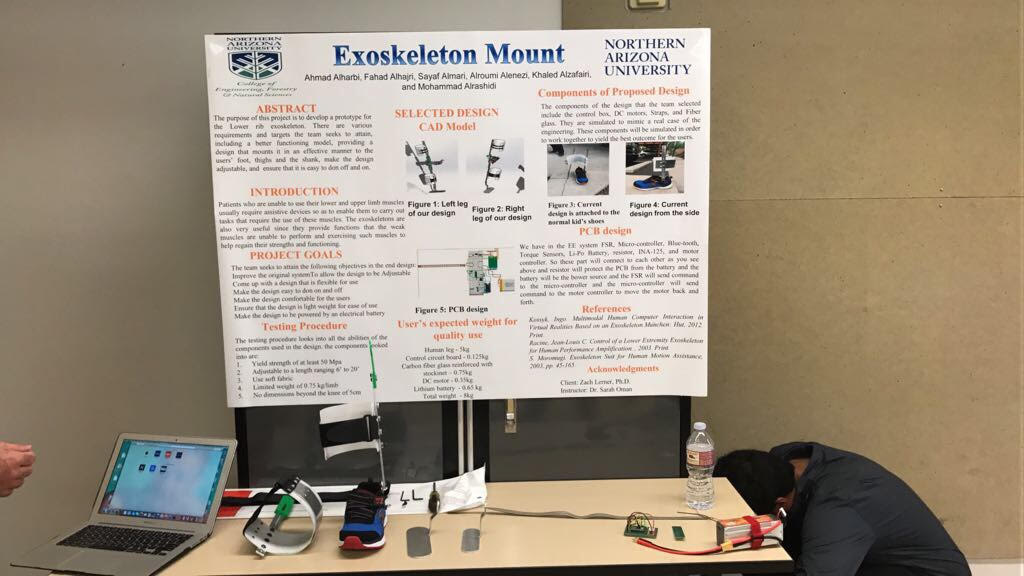
The Biomechatronics Lab uses robotic exoskeletons to improve walking biomechanics in individuals with neuromuscular disorders. Powerful motors and transmission systems act to provide assistance at the knee and ankle joints. Attaching the motors/transmission system to the body is challenging. The goal of this project is to design an adjustable system that mounts the exoskeleton’s mechanical components to the lower-extremity. Custom molded orthotics are traditionally used for this purpose; however, they require time-consuming casting and expensive molding fabrication.