






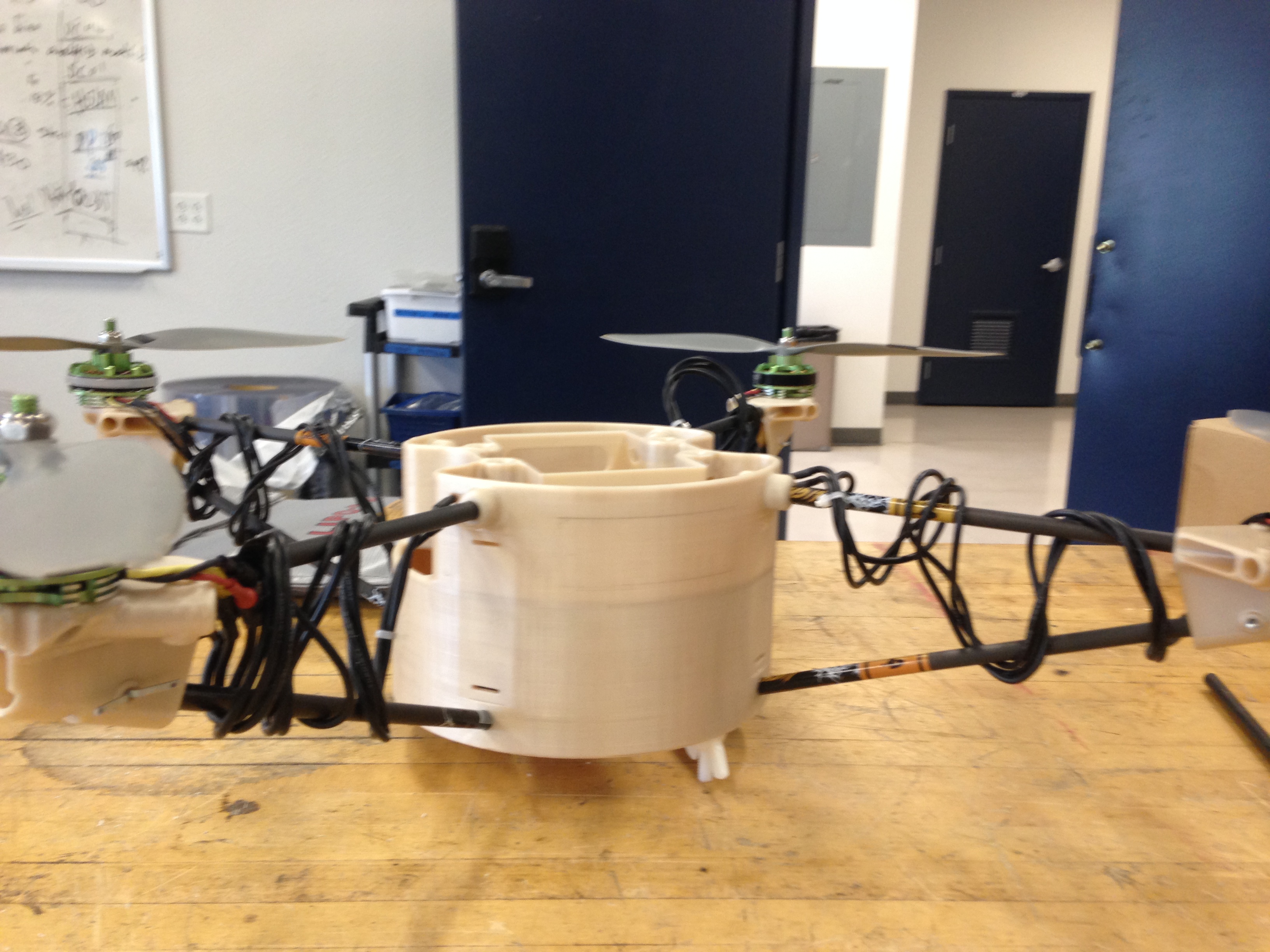
The gallery is divided into three sections; getting started, design process, and construction. These sections cover design concepts, SolidWorks models, and prototypes, respectively.
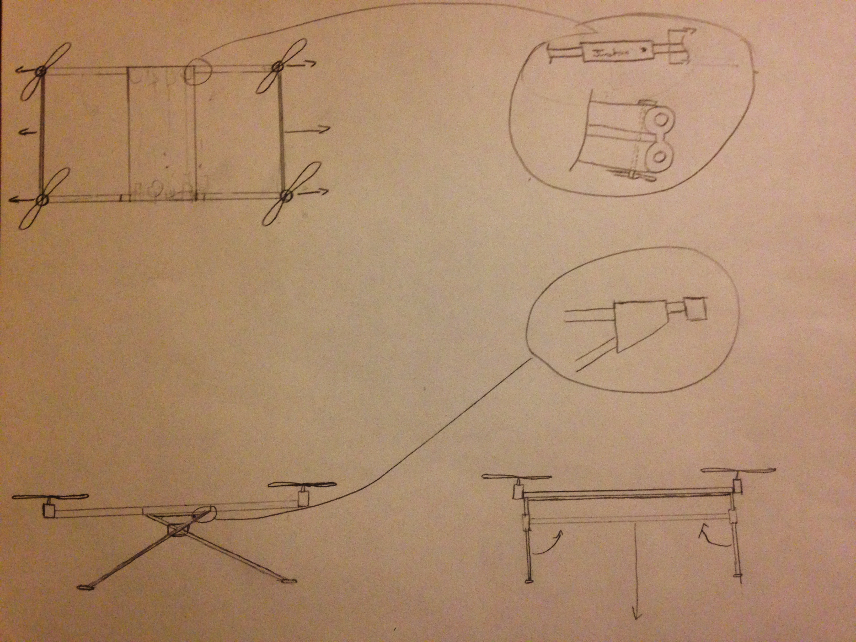
In getting started there are two separate concept designs to note; the dragonfly inspired copter (DIC) and the pipe bodied copter. The DIC takes inspiration from how dragonflies are able to fold back their wings when not in use. This design features removable, carbon fiber arrow, dual-boom arms and 3D printed motor mounts. The central hub would be rectangular and consist of carbon fiber arrow skeleton with a lightweight platform to house the electronics. All junctions between the arrow shafts would be 3D printed at Northern Arizona University, minimizing cost. In addition to removable arms, the legs would have the ability to be folded flat against the bottom of the frame. Removable support shafts would be included between arm pairs and between the legs to enhance rigidity and assist with resonant vibration through the shafts. When collapsed, this design would be very compact and flat, minimizing the amount of volume required during transport. The Pipe Body design is an H-style multirotor where the main “fuselage” of the copter is a pipe. The pipe houses all of the electronic components, except the motors, and will be the main structure for the multirotor. When the multirotor is in transportation mode the arms will be removed from the pipe and by using foldable propellers one will be able to put the arms inside of the pipe body. Putting the arms inside of the pipe will allow for the pipe to double as a protective carrying case for transport. Using a plastic or fiberglass pipe, as found in fishing pole travel cases, will keep the copter light, rigid, and low cost. This design will protect the electronics in both flight and transport modes. Both transport mode and flight mode, when coupled with friction fit end caps, will enclose all of the gear into a water resistant case. The copter is still able to be water resistant in flight mode even though the motors are exposed.
Implementation issues forced the design to go through significant changes. Design A was the design that was selected for prototyping. This design was submitted to the client and after some deliberation, a new boom and central-hub design were developed (Design B)
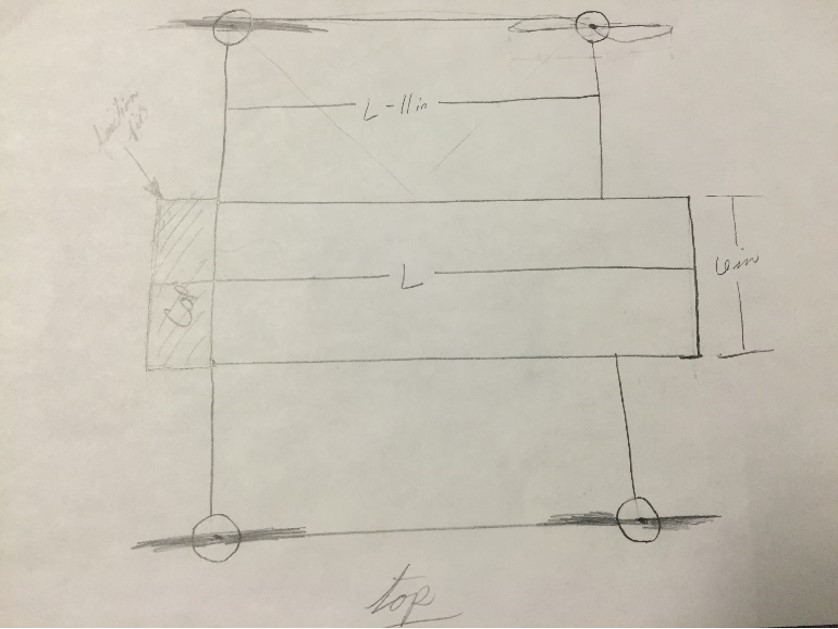
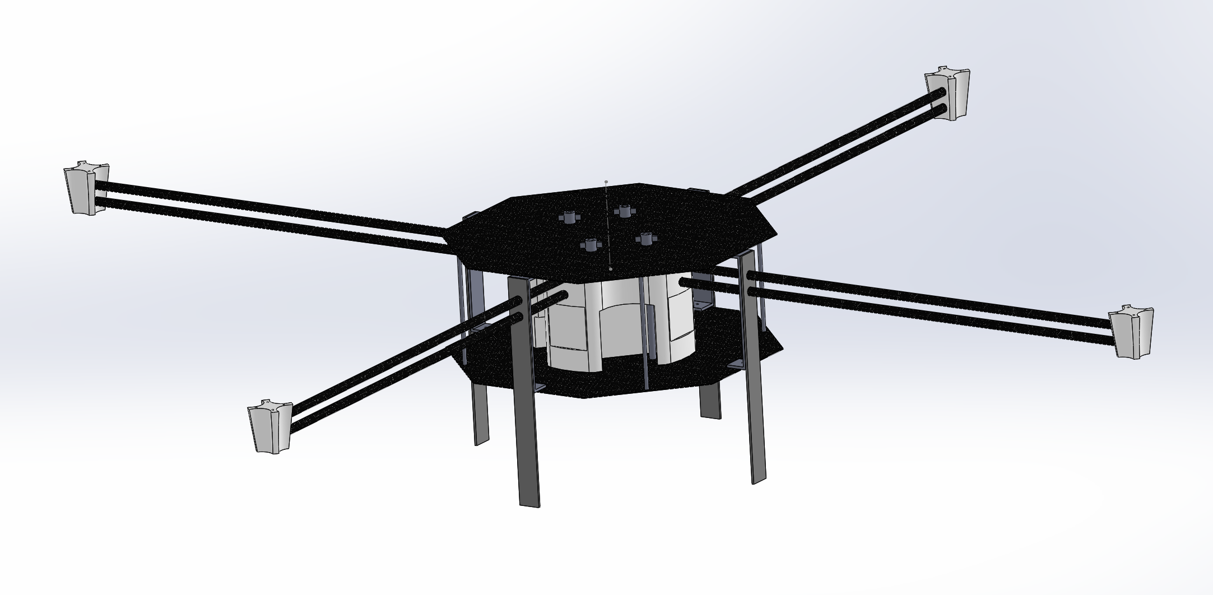
Design A
Design A was the first design selected to be modeled in SolidWorks. This design utilized a dual cantilever beam as the booms, and a central hub to contain all the electrical components. The main complication of this design was the central hub. Efforts were made to minimize the mass of the hub without affecting the structural integrity. This model allowed the team to make some preliminary calculations of the weight of the frame as a whole. These calculations created some concerns about the force distribution through the booms from the thrust required to maintain a 2:1 thrust to weight ratio. The standoffs between the plates were designed to double as supports for the booms. This added unexpected weight to the design.
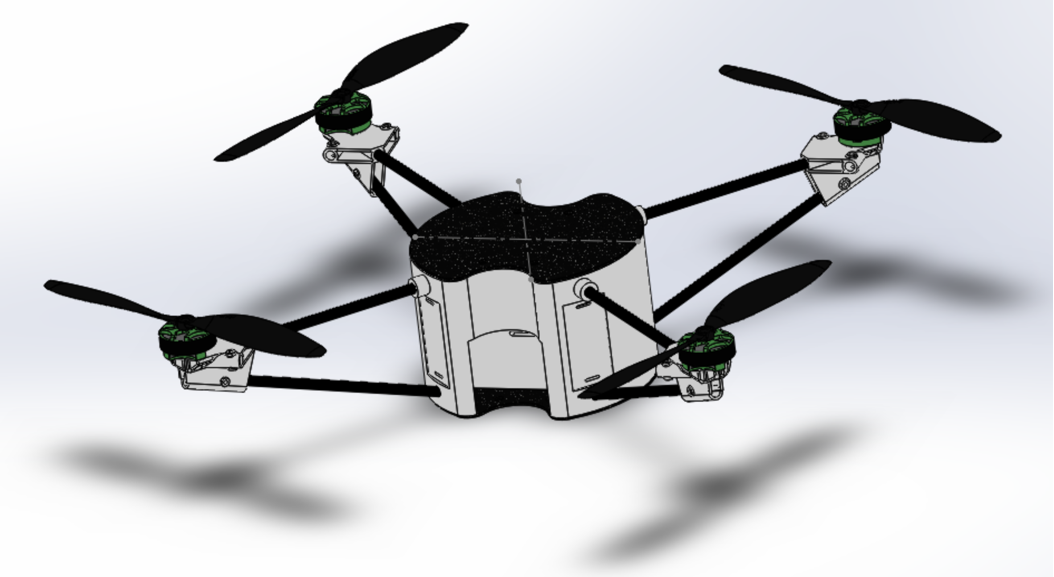
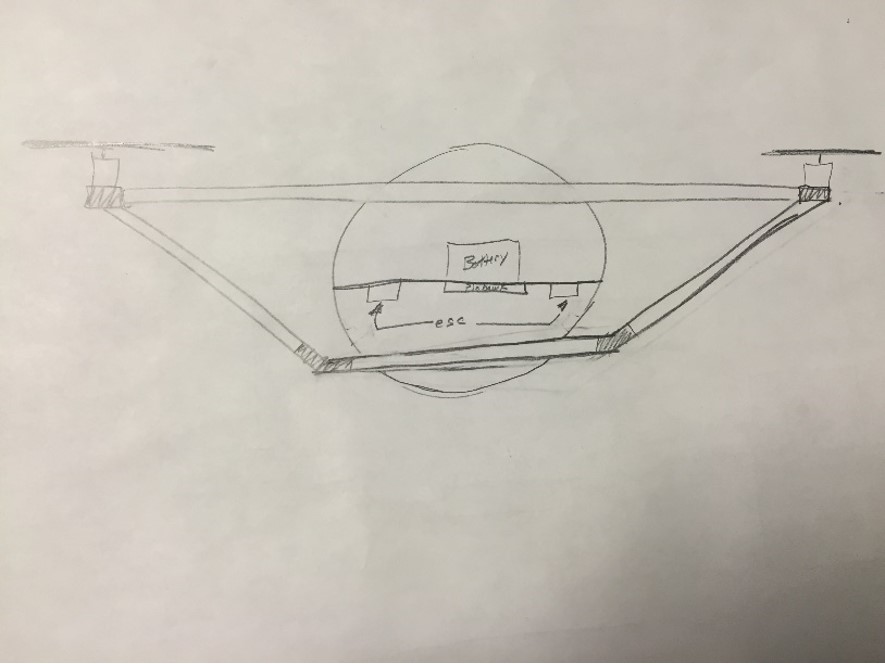
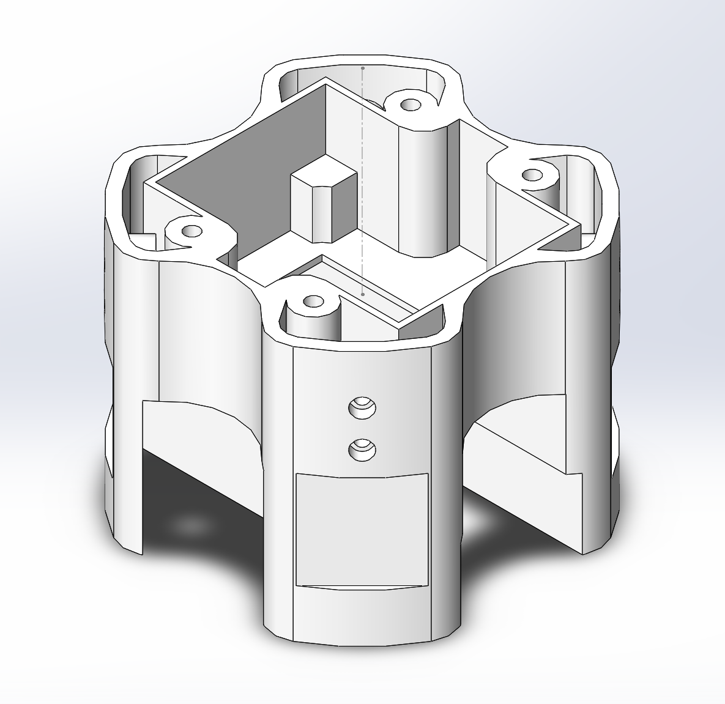
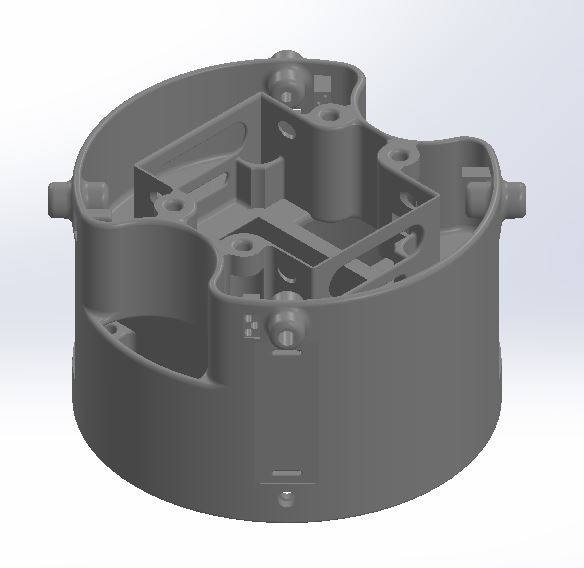
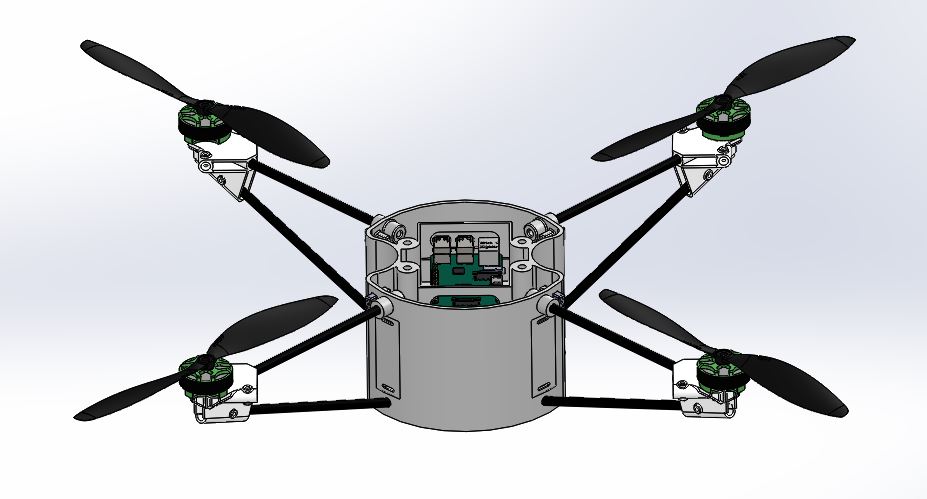
Design B
After discussions with the client, it was decided that the boom configuration would be more appropriate with a truss design than a cantilever beam design. This decision was made due to the need to use carbon fiber arrows shafts as the frame material. The truss design would eliminate the need for the standoffs between the plates. This design also allowed for both carbon fiber plates to be reduced in size which significantly decreased the cost and weight of the design. The central hub was lengthened to compensate for the new truss design and increased in diameter to allow the battery to be completely enclosed.
SUMMARY
Design Concepts
SolidWorks Modeling Iterations