Phase One
Create a low-cost, small, and autonomous robot by the October 23rd, 2025 deadline. The robot must demonstrate stochastic movement and prove the viability of vibration-driven motion. Split into two groups, our team focused on the hardware/software implementation as well as the body design. The body of the prototype was created with easy deconstruction and assembly in mind. The main body is skeletonized to limit weight. The base of the model utilizes thin legs to maximize vibration. The motors are positioned orthoganally to each other. The hardware sits vertically within a fuselage to limit any snagging on the holes while inserting components. The microcontroller was programmed to read garbage from the ADC to ensure randomized, non-linear motion.
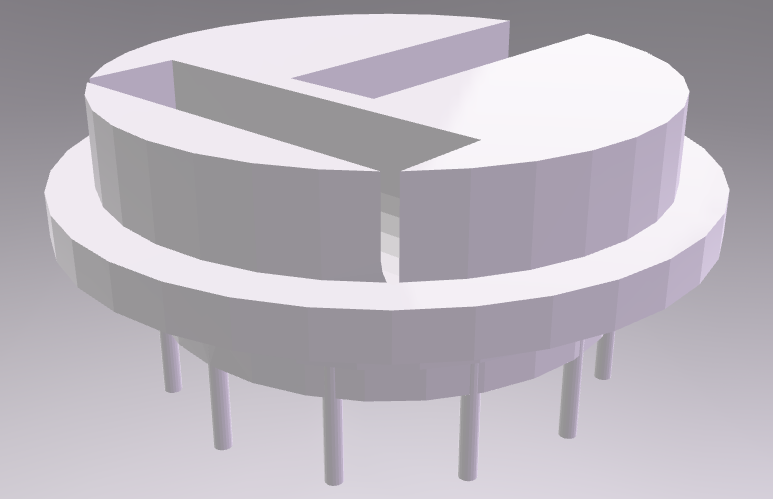
 Skeletonized Body
Skeletonized Body
 Body Insert
Body Insert
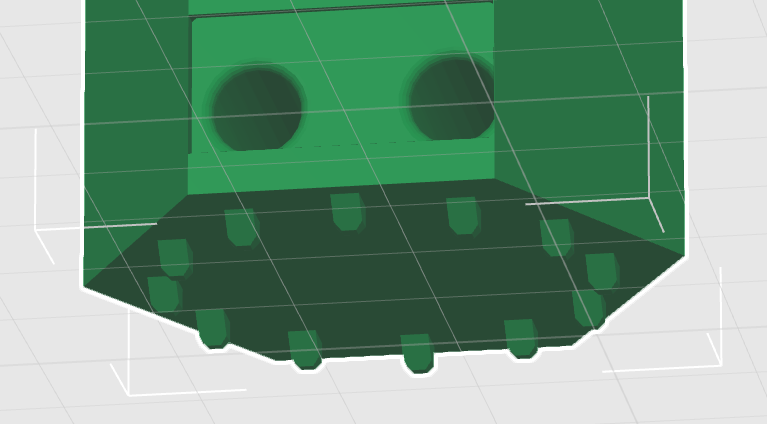
 Base
Base
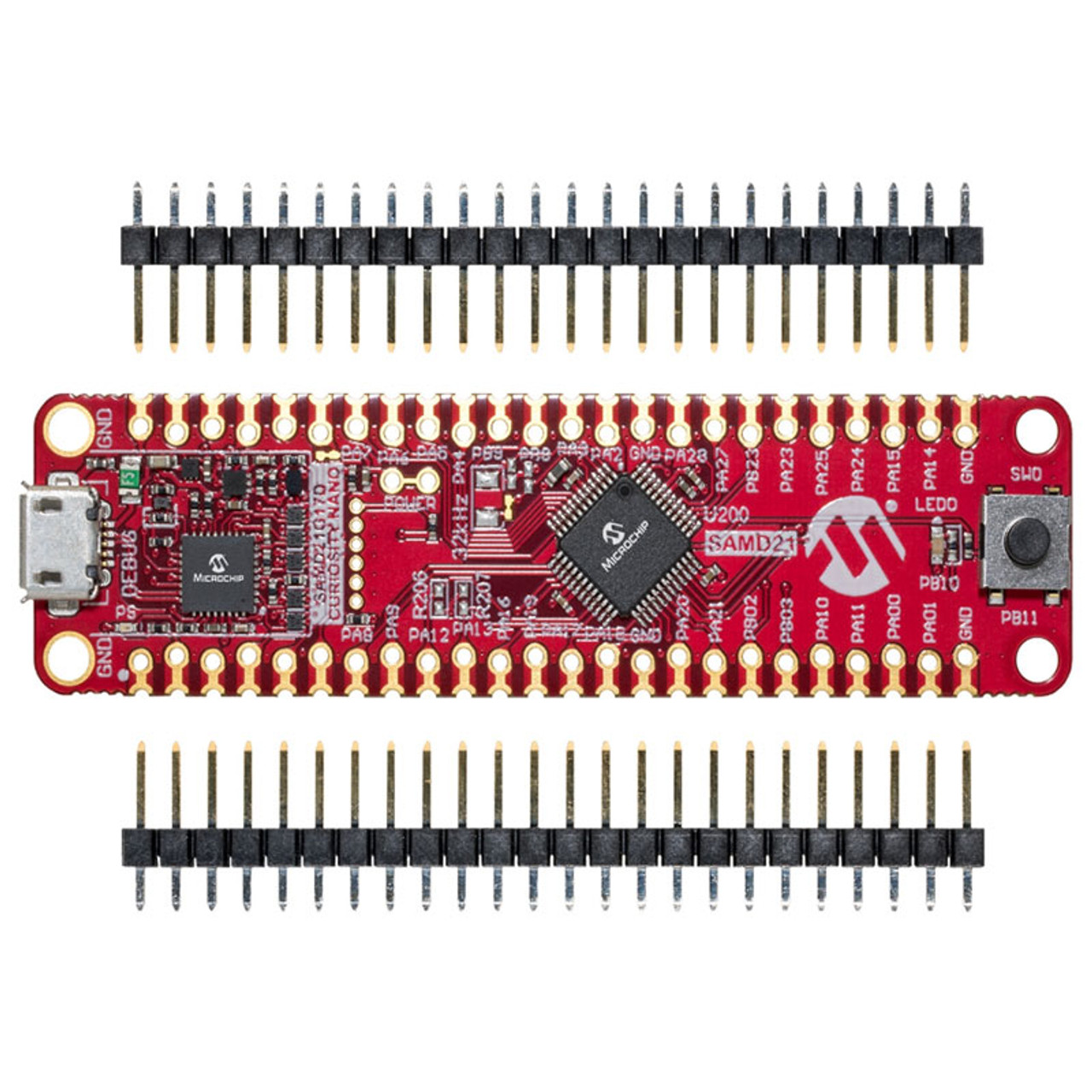 SAMD21 Microcontroller
SAMD21 Microcontroller
 VICTOR 2.0 Body
VICTOR 2.0 Body
 VICTOR 2.0 Legs
VICTOR 2.0 Legs
 XIAO Seeed Microcontroller
XIAO Seeed Microcontroller
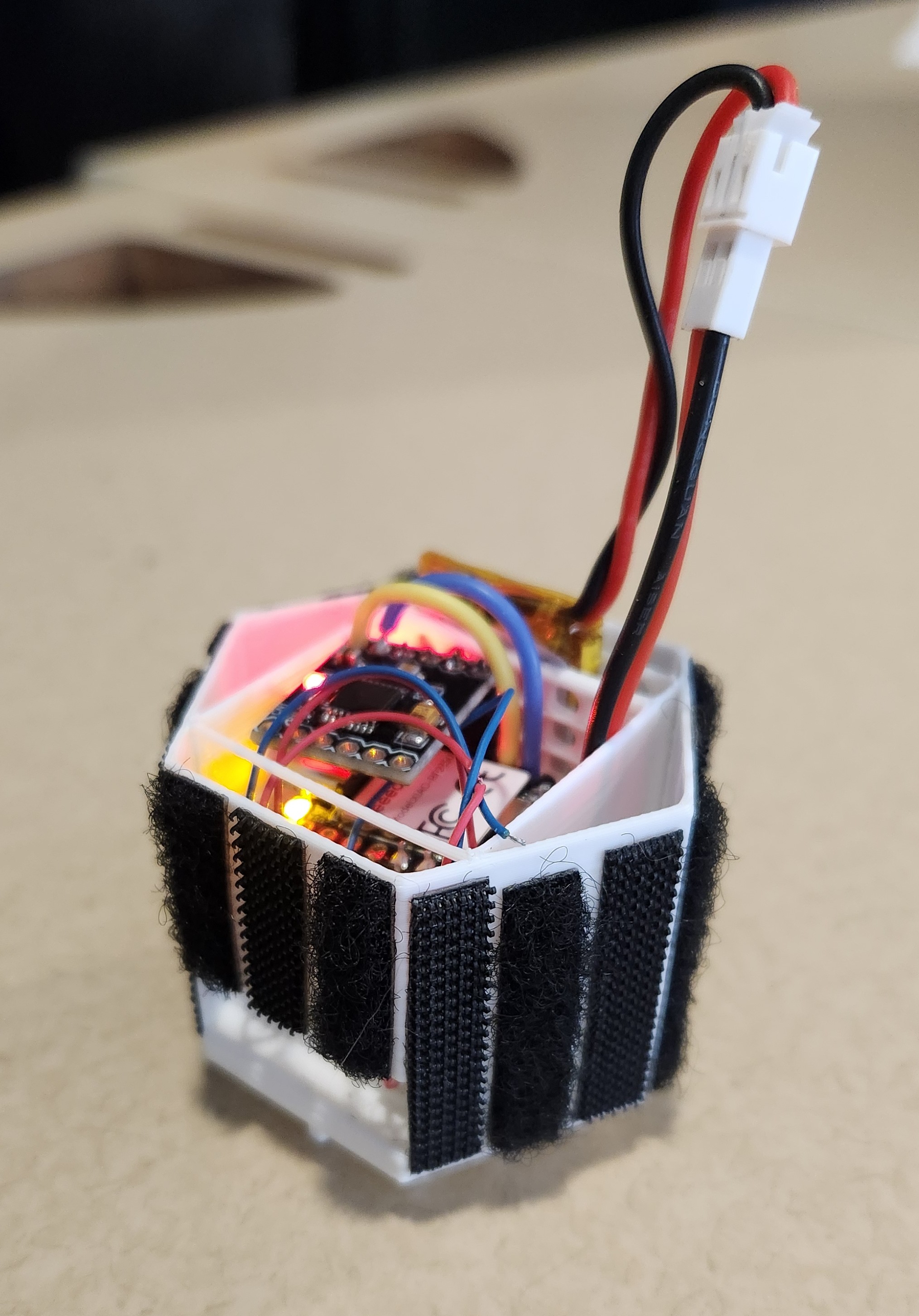 VICTOR 2.0
VICTOR 2.0