Project Description
We are building a robot to navigate through some of Arizona's 100,000 abandoned mineshafts. The objective is to remotely collect bat guano samples to assist in bat disease research for our client Dr. Viecheslav Fofanov. This research tracks harmful bat diseases among bat populations to help mitigate the spread of these diseases to humans and livestock. As these mineshafts are structurally unsound and contain a variety of chemical/wildlife concerns, they pose a considerable threat to human life. Creation of this robot allows remote collection of these samples elliminating the need to put volunteers' lives at risk.
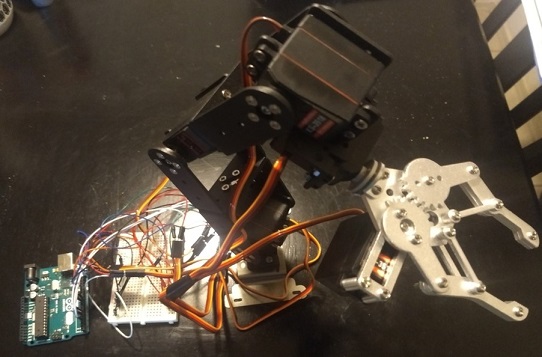
Robotic Arm for sampling during programming phase
Beginning Activites
Belows is a list of key tasks we accomplished during the beginning stages of the project
Identify requirements given project description
Consult Dr. Fofanov to clarify constraints and requirements
Research potential methods for scooping, navigation, and transmission
Formulate plans to address each subsystem
Prototype subsystems
Use lessons from prototypes to formulate final design plan
Research appropriate parts and tools to implement final design
Milestones
Below is a list of key milestones met and tasks/outputs from each milestone
Prototyping
Outputs: Mentor/Client Demonstration & Class Presentation
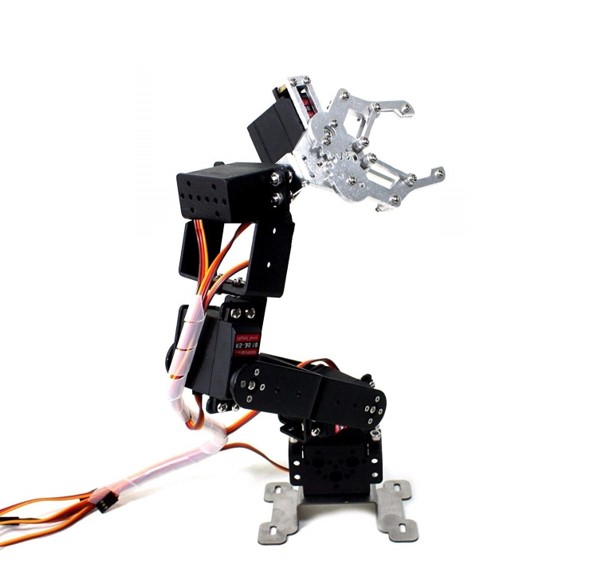
Robotic Arm: Show the maneuverability of the robotic arm to verify potential for sampling purposes
Navigation: Demonstrate control of small motors for movement of a prospective crawler
Sampling: Present low fidelity version of multiple sample scoop attachment
Final Design Plan
Outputs: WBS, Gantt Chart, Schedule Documention
Breakdown subsystems into smaller tasks and distribute among team members
Identify the primary contingincies of the project: Completed subsystems, Assembly, Testing, Finalization
Formulate tasks into schedule and final list of features approved by Dr. Fovanov
Order parts for completion of independent subsystems and misc. tasks
Subsystems Completion & Misc Tasks
Outputs: Design Review Reports & Presentations
Sampling: Program robotic arm to carry sample vial and perform scooping sequence to collect samples
Navigation: Build and control all terrain robot crawler complete with speed adjustment and turning
Transmission & Control: Successful implementation of 100ft of USB cable to receive camera feed and send commands to Arduino Mega controller
Misc: Shield electrical components from environmental damage. Power all electronics with lasting rechargable power source.
Assembly
Mount robotic arm, IR camera, and controllers to chassis
Combine programming for robotic arm with navigation for crawler
Wire battery, transmission cables, crawler motors, and robotic arm to controller
Testing
Navigate multiple terrain in light and dark settings to max distance
Perform sample collection at max distance
Verify IR camera can provide necessary feedback to perform navigation and sample collection at max distance
Perform previous tests from the entrance of a mineshaft, verify ability of robot to navigate in and out
UGRADS & Finalization
Outputs: Oral & Poster Presentation, User Manual, Final Product
Organize documenation into professional poster and powerpoint for undergraduate symposium
Present to peers and professionals the robot exhibit and poster/presenation as supplements
Compose user manual for robot operation and maintenance
Demonstrate robot function to Dr. Fofanov
Finalize wiring, make desired changes from client to programming
Deliver final product, source code, and user manual to Dr. Fofanov
Hardware
Here are the parts we used to build our robot







Design Decisions
There were 4 primary design decisions that dictated the course of the project:
1. IR Camera: With the requirement to navigate into dark mineshafts without disturbing wildlife with bright lights, we chose to use a dual color/IR camera with built in IR emitters to avoid the need for an additional light source.
2. Wired Transmission: Signal attenuation of a wireless signal deep underground would cause too many concerns for stable transmission. Thus, we chose to control and receive signals through 2 100ft USB cables.
3. Custom Built Crawler: Our original plan was to modify a pre-built RC car for our needs, but this solution did not offer a stable mounting point for the robotic arm and controllers. As a result we decided to build a crawler from scratch.
4. Single Sample Collection: We desired to include the capability to collect multiple guano samples in a single dive into a mineshaft, but space to hold and secure additional sample vials on the frame of the robot did not allow for this feature.
Testing
To test the completed robot we began with merely navigating on a flat surface the maximum distance, performing a scoooping sequence, and navigating back to the terminal in a lighted setting using the camera for visual reference. This test was successful and proved the general funcionality of the robot. We then repeated the test in a dark setting and again were successful. Then we performed this same test in rough terrain and discovered that bouncing would cause the shocks of the crawler to collapse causing the crawler to scrape the ground as it moved. Evidently the whole of the robot was too heavy for the stock springs provided in the kit and we therefore had to upgrade to stiffer aftermarket springs. We performed this test again but in a tighter space and realized that the turning process was not feasible for extremely small spaces, requiring up to a 15 point turn to face the opposite direction. We modified the program for the motors to turn more drastically and fixed this issue. With this last fix, the robot successfully passed the tests and was essentially complete.
Obstacles
There were several obstacles we encountered during the course of this project. As mentioned in the design decisions we changed our plan from modifying a prebuilt RC car to building a custom crawler. This resulted not only in a delay in ordering the needed components but waiting for them to arrive. Many parts were put on backorder causing the team to lose weeks of potential assembly and testing time. Additionally, the camera we intended to order was not the camera that arrived as two cameras with different capabilities had shared product numbers. This caused additional delay. Last, a language barrier between team members often led to miscommunication and a slightly uneven distribution of the workload. This added delays throughout the project. In general the primary obstacle to this project became a lack of time, compensated for by working late into the night on many occassions and budgeting express shipping for parts in later stages.
Final Product
Here we provide a rundown of the final product delivered to Dr. Fofanov.
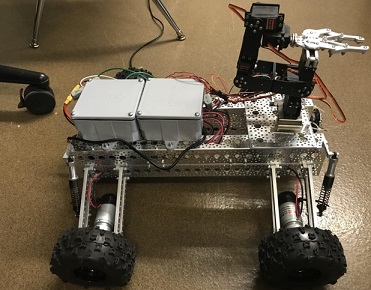
Completed Robot Pooper Scooper
Features
Fully alluminum chassis and robotic arm for easy disinfection
Zero-light video transmission from IR camera
Six-joint, six-servo motor fully programmable robotic arm, ready for sampling
Fully customizable crawler chassis for easy modification
Simple controls for users with little to zero programming experience
Applications
Ability to enter 100ft into mineshafts to retrieve bat guano samples
Easily adapted to retrieve soil or other animal samples
Research Benefits
Dr. Fofanov will now be able to conduct his research without regarding volunteer schedules or putting himself or others at risk
This can greatly speed up his research process to yield a large amount of data in a short period of time
As his goal is to replicate this robot for widespread use, adaptations of this device could provide similar benefits to his colleagues across the country
Team Bat Bot

Aaron Whitaker
Team Leader & Sponser Liason

Ryan Kramer
Treasurer

Yihan Wang
Scheduling Coordinator

Wenhui Zhu
Secretary
Acknowledgements

Dr. Viecheslav Fofanov
Client & Sponser

Dr. Kyle Winfree
Capstone Instructor

Ashwija Korenda
Project Mentor