Around the world there are people who are struggling with basic motor skills. From walking, holding, and or stretching, patients are in need of devices to help aid physical therapy.
The aim is to have a game system that interfaces the Biomechatronics Lab's open-source rehabilitation technology to help researchers around the globe develop effective clinical tools/interventions for those with mobility impairments. Short Term: Have a framework for a flexible gamified rehabilitation tool. Long Term: Build off the framework to enable researchers to easily design their own gamified rehabilitation strategies.
Giving the patient and the researcher real time biometric data for instant feedback on the patient's movements.
Presenting the patient's data in the form of a game will help encourage and excite users to continue training.
Each patient is different. Our software will allow researchers to create custom goals for their patients to execute. Allowing for use across any and all kinds of movement.
Currently, there is no pre-existing open-source software built for rehabilitation technology. Our goal is to create a foundation and example of others to use and also expand upon.
- Display engaging intractable visuals for the users. Using any pre-existing game engines such as pyGame, Unity, Unreal, etc. users will be able to see their own real-time progress.
- The frontend will also allow researchers to choose different installed games, set/adjust user goals, and grant the ability to change exoskeleton parameters at any time, all within the pre-existing python application.
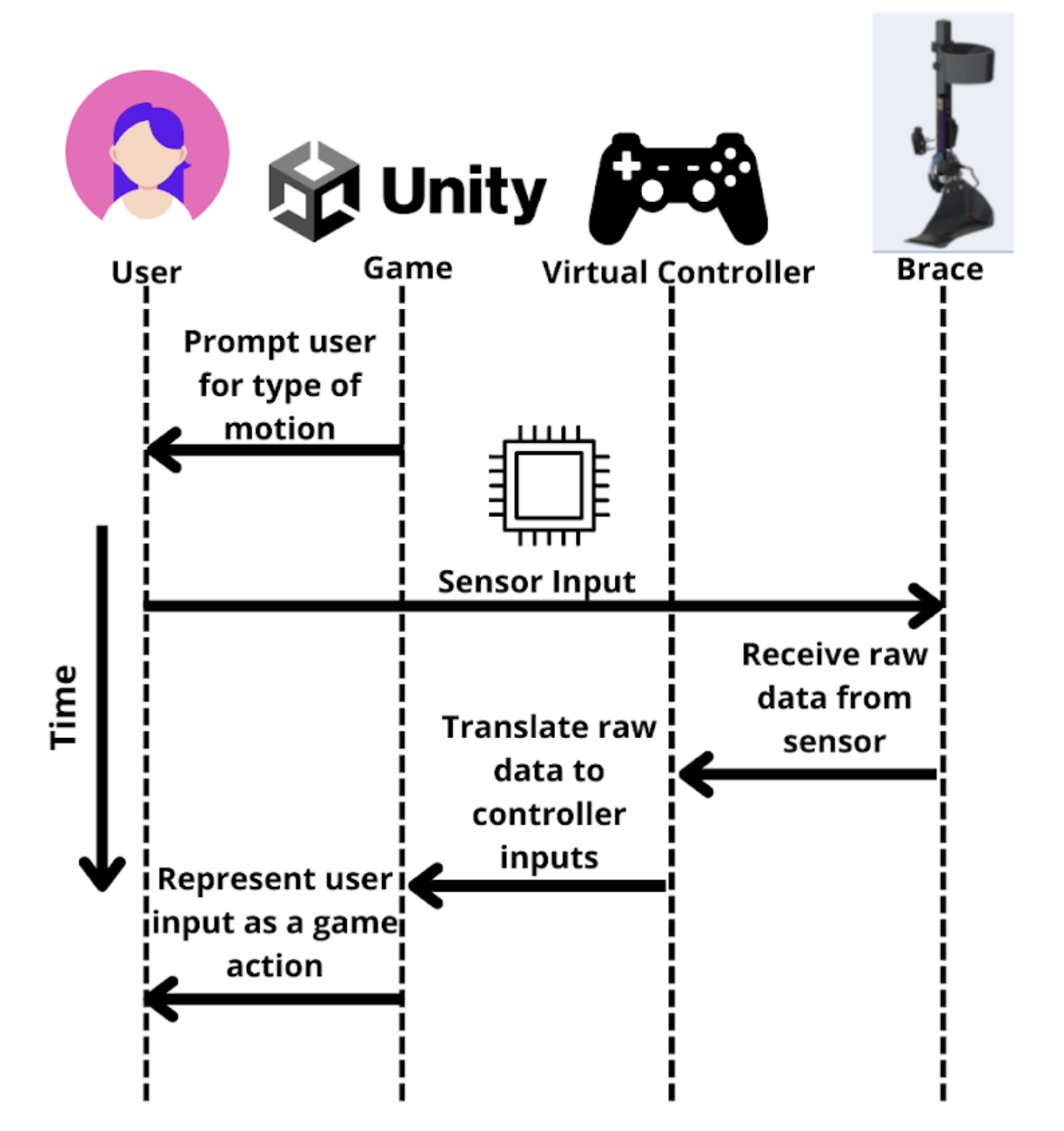
- Develop a framework that takes in the raw biometric data of a user, and translate it into standardized controls for game engine platforms. Using python libraries such as vGamepad, biometric data can then be understood by any game engine platform that has controller support.
- After a user's game is finished, a csv file of data will be created. Displaying a user's success rate, amount of exoskeleton assistance, and the researcher's set goals.