Project Constraints and Requirements
- Device must perform like an iris
- Must meet ANSI an OSHA standards
- Diameter range of 0.5 - 30mm
- Length range 8- 76mm
- Radial Force 108 - 823 N
- Must be below $3,000
- Specified tolerances for diameter, length, and radial force
- GUI that recieves input and outputs both diameter and radial force
Design Alternatives
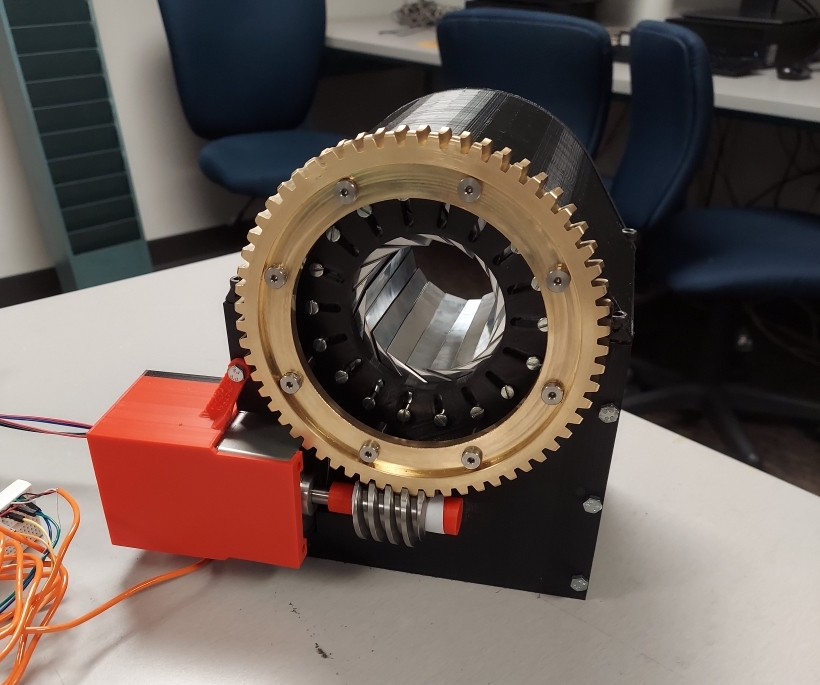
Concept Design
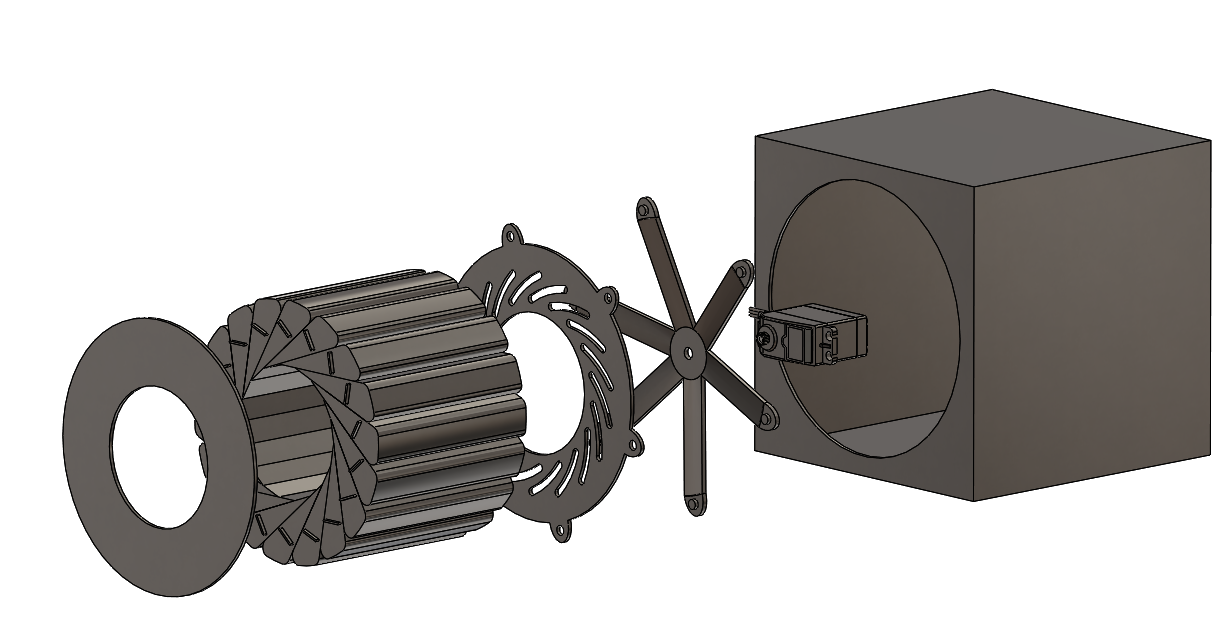
Concept Design
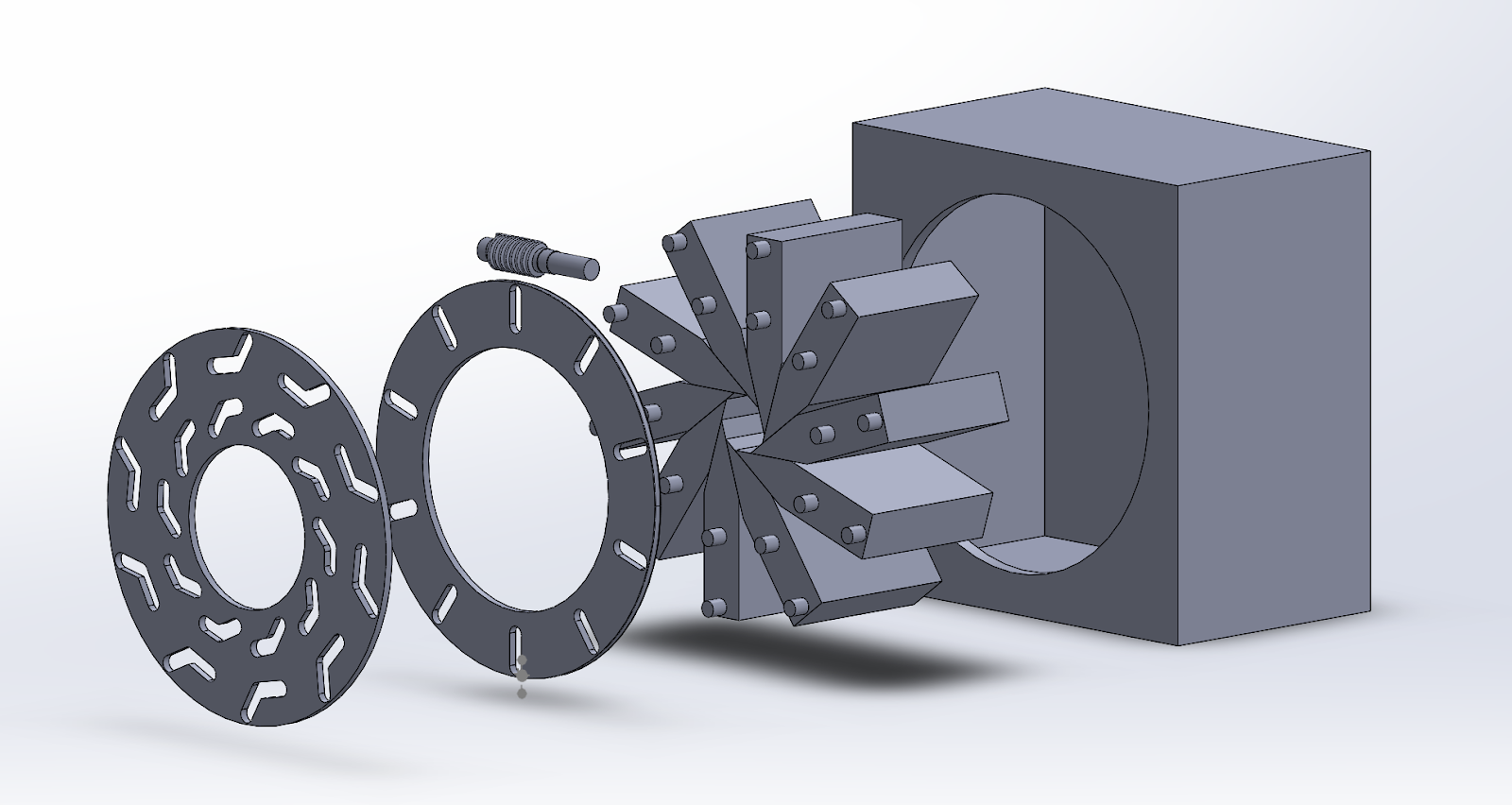
Concept Design