Loading...
Project Requirement
- Must contain system to operate the arm electro-mechanically
- Requiring an interface to read input from the user
- Must have a sensory and stimulation subsystem for feedback to the user, the sense of touch
- Must have a battery life to last a full working day, about 8 hours
- Must provide and obvious benefit over the passive arm system
- Must be open source, so anyone can access our research and benefit from it
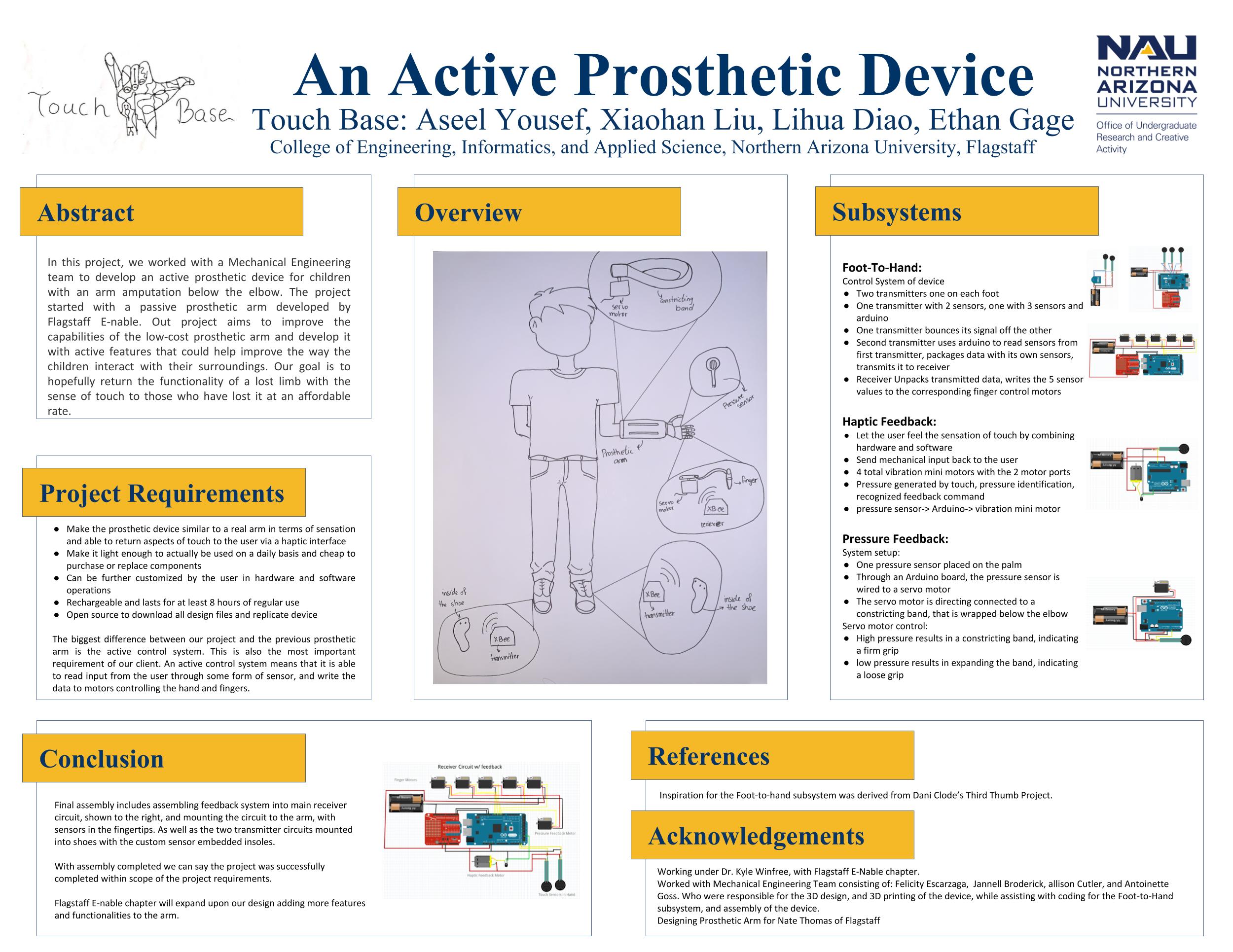
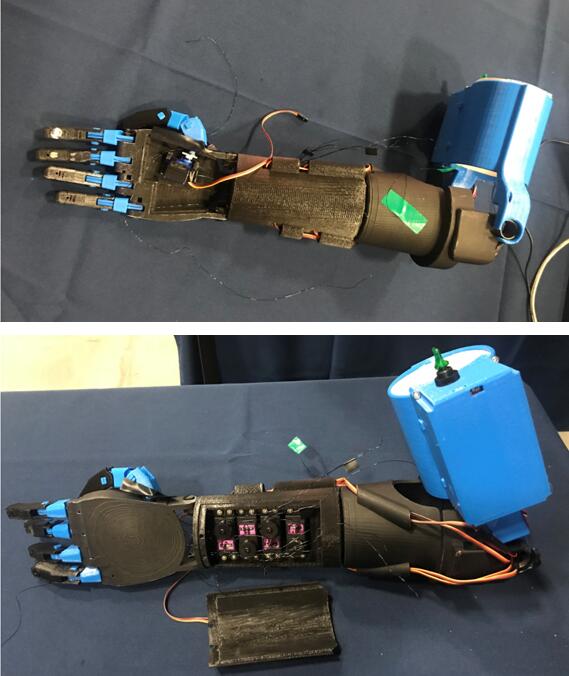
Project depiction
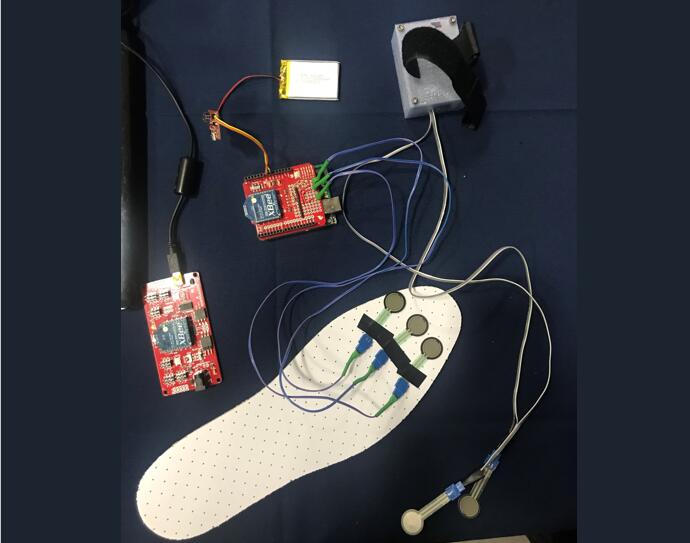
Foot-To-Hand
With this system it allows for the user, Nate, to control the hand with a fine degree of accuracy over each finger. We have 5 sensors across the two feet to control each of the fingers, 2 for the thumb, one for the each the pointer, and ring finger, and the remaining sensor controlling the two motors for the ring and pinky fingers.
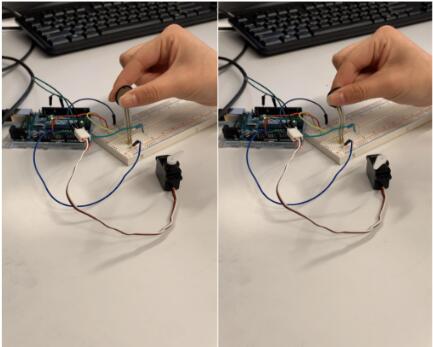
Pressure Feedback
This is our original feedback system that we designed to give the user a sense of touch. The code completed by aseel, reads data from a pressure sensor mounted on the finger/hand, and maps the value to a servo motor, similarly to how the foot-to-hand motors are controlled, with a linear mapping of the sensor value to the servo value.
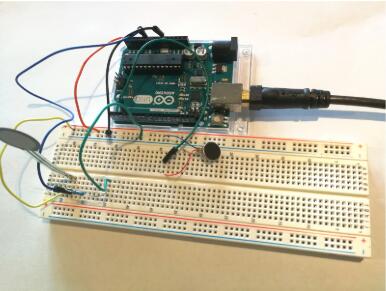
Haptic Feedback
A secondary feedback system we are implementing in the project. We have the haptic motors, and a circuit board that can control them. The Redbot mainboard has an H-bridge for controlling two RC motors, that would be for the left/right driving wheel of an RC car, we use those ports to run two haptic motors. The Redbot library we are using has simple commands installed that will either activate one motor at a time, or both, all with variable speed. The code right now vibrates the haptic motors with more speed in response to more pressure on the sensors mounted on the hand. It allows for future updates to vibration pattern, and intensity.
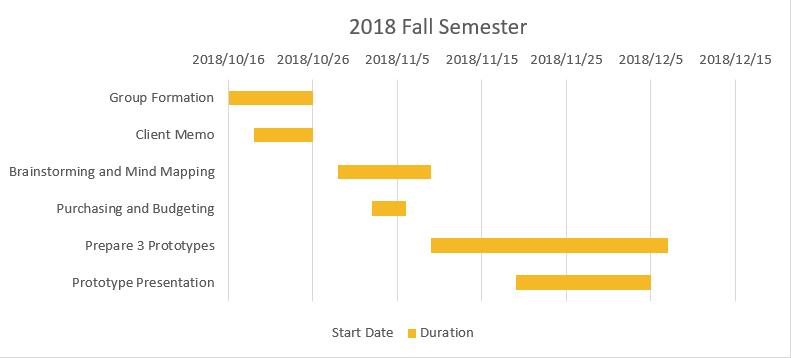
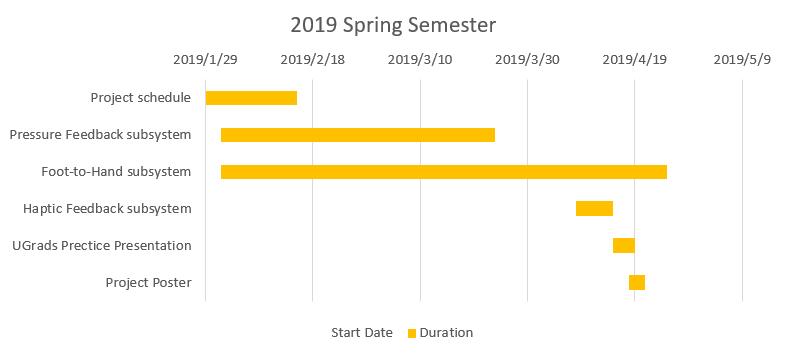
Gantt chart and Milestones
| Date | Description | Files |
|---|---|---|
| 2018/10/26 | Finished Client Memo | Client Memo.docx |
| 2018/11/1 | Meeting with Client | |
| 2018/11/9 | Finished Brainstorming and Mind Mapping | Brainstorimg and Mind Mapping.docx |
| 2018/11/20 | Decided three subsystems: Myosensor; Toe-to-Thumb; Touch. Decided three prototypes: Reading Muscle Data (Ethan); Read Analog Sensor Data (Lihua, Xiaohan); Control Servo Motor (Aseel). |
|
| 2018/12/4 | Finished prototypes and made presentation | Prototypes presentation.pptx |
| 2019/2/1 | Start Pressure Feedback subsystem, Myosensor subsystem, Toe-to-Thumb subsystem. | |
| 2019/2/5 | Made schedule presentation | Schedule presentation.pptx |
| 2019/2/15 | Finished | |
| 2019/2/25 | Cancel Myosensor subsystem. Change Toe-to-Thumb to Foor-to-Hand. | |
| 2019/2/26 | Made design review 3 presentation | Design Review 3.pptx |
| 2019/3/1 | Made individual Work Breakdown Structure | WBS Assel.docx
WBS Ethan.docx WBS Lihua.docx WBS Xiaohan.docx |
| 2019/3/24 | Finished Pressure Feedback subsystem. | |
| 2019/4/2 | Made design review 4 presentation
Add Haptic Feedback subsystem |
Design Review 4.pptx |
| 2019/4/8 | Start Haptic Feedback subsystem | |
| 2019/4/15 | Finished Haptic Feedback subsystem. | |
| 2019/4/17 | Made UGrads practice presentation | Ugrads Presentation.pptx |
| 2019/4/25 | Finished Foot-to-Hand subsystem. | |
| 2019/5/9 | Made User Manual | User Manual.pdf |
Hardware and Software Tools
| Foot-to-Hand |
Hardware Tools:
|
| Pressure Feedback |
Hardware Tools:
|
| Haptic Feedback |
Hardware Tools:
|
Final Project
- Design features:
This is a low-cost and active control device which will help to improve the way children interact with their surroundings.It enables children to control fingers and get the sense of touch feedback.
- Benefits:
- The device was developed with aspects of haptics feedback to mimic the functionality of the touch sensation.
- The device is light enough which makes it convenient be used on a daily basis.
- The components used in the device are cheap which makes the device affordable.
- The batteries used to power the electrical components are rechargeable and last for more than 8 hours.
- All design files are uploaded as open sources for future development.
- Application:
Our project still has potential because it is an open source. Our aim is to make sure that you are able to profit from our product for many years to come!