
Report 7
Home | Introduction | Reports | Presentations | Results
PVC of Four Leg Inverters with LC Filter
Four leg converters provide one of the best solutions for providing paths to neutral currents in both low and high-power applications [1]. This allows the use of four leg converters in many applications such as electric drives and grid-connected distributed generation. These applications require precise current control while other applications such as dynamic voltage restorers require tight output voltage control [1]. The topology of a four-level inverter is seen below in [1, Fig. 1].
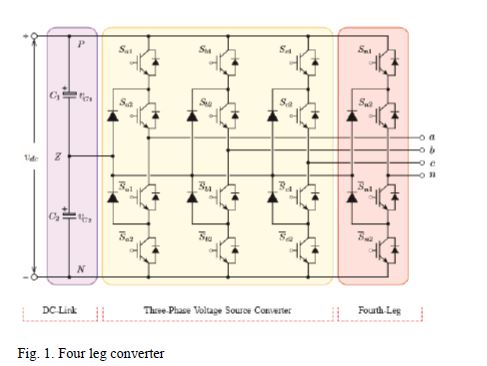
16 IGBT and eight clamping diodes are used to implement a four leg neutral point clamped converter which then gets attached to an LC filter as seen in [1, Fig. 2].
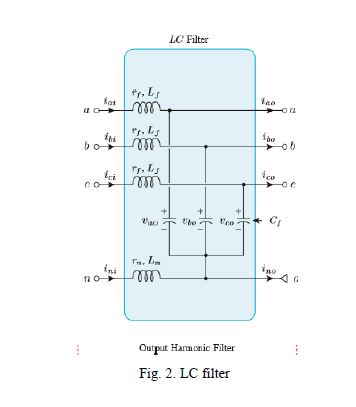
The current and voltage vectors of various components of the converter can be derived and by utilizing Kirchhoff's voltage and current laws to the LC filter the state-space model of output voltages and currents can be obtained [1]. To implement this model digitally a discrete-time control algorithm model is necessary, thus the continuous-time state space system is converted to a discrete form as seen in [1, Eqn. 1].
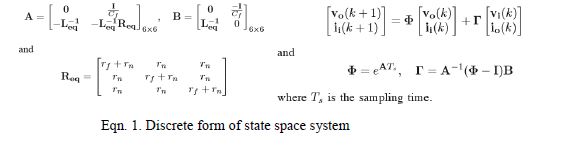
To realize the PVC scheme only Vo(k+1) is computed [1]. The reference voltage and currents are calculated using a cost function as the future value of reference voltages are calculated by an extrapolation block. Using the present and past samples of voltages the discrete-time predictive model can accurately predict the future values of the voltages that will need to be controlled [1], an example cost function is shown in [1, Eqn. 2].

¥dc is a weighting factor for helping the designer balance the DC-link capacitor voltages [1]. After calculating every possible switching state utilizing [1, Eqn. 2] the state that minimizes the cost function is the selected and applied to the circuit. Additionally, the designer can add other constraints to the cost function realize current limitations and frequency reduction [1]. The dynamics of the load voltages and DC-link capacitor voltages are determined by the current switching state of the converter. The next switching state is determined by a control algorithm derived from the discrete-time model of the current system. While the cost function cannot achieve perfect predictions an well designed cost function can cause the current to track a reference with very low error margins [1]. Also, a well-designed cost function can perform in either a predictive voltage or predicative current application to eliminate the need of separate cost functions.
References
[1] V. Yaramasu, M. Rivera, B. Wu, and J. Rodriguez, “Predictive control of four-leg power converters,” 2015 IEEE International Symposium on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), 2015.