
Report 5
Home | Introduction | Reports | Presentations | Results
PCC of Three-leg Converter with R Load
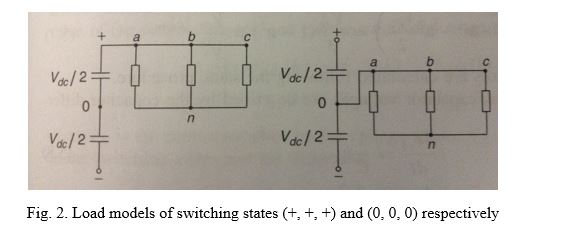
The utilization of model predictive control (MPC) in current control is a widely studied problem in power electronics [1]. In a three-leg three-phase inverter the predictive current control scheme is based on the fact that only a finite number of possible switching states are possible within the converter [1]. Because of this we also only have a finite number of possible system models that could be used to predict the variables behavior for each switching state [1]. In order to determine which finite state will be optimal a set of rules must be made [1]. Within these rules a cost function must be created that will evaluate the predicted values of the system variables [1]. These values are calculated for each possible switching state and the state that has the best minimization of the given cost function will be selected [1]. In short, the predictive current control strategy is to define a cost function, build a converter model and all of its possible switching states and build a load model [1]. The model of the load is important because we need it to predict the behavior of the variables evaluated by the cost function, which will determine the load currents [1].
The focus of current control is to minimize the error between the measured and referenced values which will be expressed as a cost function g. The cost function will be expressed in orthogonal coordinates and will measure the difference or error between the reference values and predicted values [1].

In [1, Eq. 1] the real and imaginary portions of the expected load current vectors (i*) for a given voltage vector are compared to the referenced current vectors (ip) [1]. γdc and γn are weighting factors that handle the relation between reference tracking, voltage balance and reduction of the switching frequency [1].
Models of the converter are then generated, since series switches have to be in different operation modes to prevent short circuits the signals can be represented with Sx1, Sx2, Sx3 and Sx4 [1]. These switching signals will determine the output voltages where Von = Sn*Vdc [1]. The various switching states (Sx1, Sx2, Sx3, Sx4) can be evaluated for all phase values as seen in [1, Fig. 1].
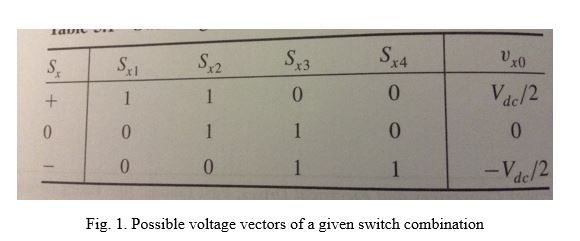
Sx is the switching state variable of phase x, Sx can take on the value of +, 0 or – that will generate the phase out put voltages Vdc, 0 and –Vdc [1]. For three phases the inverter will have a possible 27 switching states, some of these voltage vectors are redundant because the same vector can be generated multiple times [1]. These voltage vectors are calculated by analyzing the model of a given switching state.
Because of modulation techniques such as pulse width modulation (PWM) the inverter can be approximated as a linear system [1].
Predictive current control maintains voltage balance in the DC link and reduces the switching frequency [1]. This method also has a simple implementation of a voltage balance strategy, reducing the amount of time required to calculate values [1]. Predictive current control (PCC) effectively controls load currents and achieves a comparable dynamic response and reference tracking with established control methods [1].
References
[1] J. Rodriguez and P. Cortes, Predictive control of power converters and electrical drives. New York: John Wiley & Sons Inc, 2012.