
Report 4
Home | Introduction | Reports | Presentations | Results
Standalone Four Leg Converter
Standalone power systems (SPS) are perhaps the most promising solution available to powering remote customers that does not require a connection to the grid [1]. SPS require different power converters to adequately supply power to various customers [1]. Typically a three leg voltage source inverter (VSI) is the preferred choice for supplying three phase power because it is simple to implement [1]. Three leg VSI’s do suffer from a couple main problems, first they lack a sufficient input voltage due to the nature of renewable sources [1]. Second, three leg VSI’s are designed to power balanced three phase voltage to their loads, in reality the loads a SPS will work with are unbalanced [1]. While various solutions exist to overcome these drawbacks more problems arise, instead some turn to the four leg inverters to eliminate these issues.

As seen in [1, Fig. 1] a four leg VSI has been developed to help mitigate the shortcomings of the three leg VSI. Four leg VSI’s have many advantages such as a higher utilization of the direct current (DC) link voltage [2]. Having a fourth leg gives this inverter an additional degree of freedom [2], the DC link capacitor can be smaller due to having no zero sequence current flow across it [2]. The four leg VSI is also a transformerless converter, as it utilizes an extra pair of insulated gate bipolar transistor (IGBT) or diodes in place of the transformer [1]. While increasing the amount of switches does pose an issue with developing a control system to manage the switching states, modern controllers should be able to handle systems of this level [1]. Lastly the four leg VSI has common mode voltage reduction, this is a problem that becomes more prevalent as the voltage levels increase [1]. While the switching noise will pose issues, having a fourth leg allows the designer to reduce the common mode voltage to a certain level [1].
A standard four leg converter contains 16 possible switching states, though some designers add a 17th possible state [1]. During operation, a dc voltage is impressed across the load resistor giving the inverter 14 possible active vectors and three zero vectors which occur when the switching state short the load terminals [1]. The four leg inverter allows for a shoot through zero vector to be possible, which is typically impossible in a traditional inverter [1]. Because this zero vector is possible the source network provides the inverter a unique buck-boost feature [1].
Due to having more possible switching states than traditional inverters, the four leg inverter requires more complex switching schemes [1]. A popular scheme typically implemented is three-dimensional space vector modulation (3D SVM), which is considered the best switching scheme for this type of inverter [1].
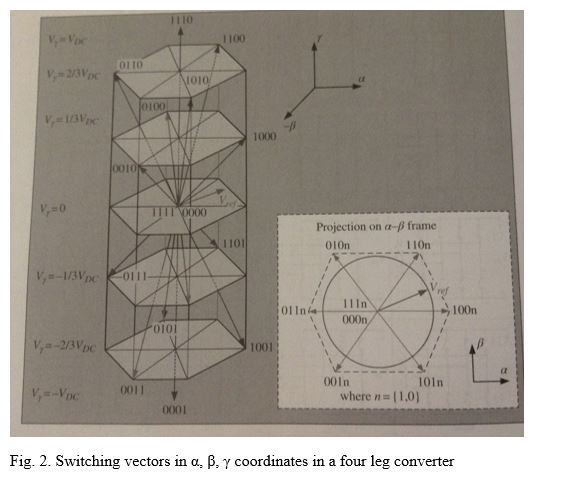
As seen in [1, Fig. 2] seven different voltage levels create seven layers of space, then a determination of the projection onto α and β plane is determined [1]. In order to calculate these rotating reference vectors we must: identify the prism and tetrahedrons, project our reference vectors, sequence the selected switching vectors and generate a modulation index [1]. To identify our prism we look at our values of Vα and Vβ of the rotating reference vector [1]. This will determine which prism the reference vector resides in, now that we have determined which prism to use we need to determine the tetrahedron within that prism [1]. To determine which tetrahedron our reference vector is we look at the phase voltages and comparing the magnitudes of those voltages to zero [1]. To determine the projection of the reference vector the following calculations must be made [1].
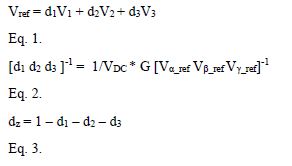
d is the duration of the selected switching vector and G is the matrix to compute the duty ratios [1]. Now the selected vectors undergo Class II center aligned SVM which provides the best compromise between switching loss and harmonic content [1]. Lastly the waveform of modulation index is generated from the duty ratios calculated in [1, Eq. 3].
Another popular switching scheme is the carrier-based pulse width modulation (CBPWM) scheme [1]. This method does not utilize vectors and under open loop conditions provides equivalent results as 3DSVM [1].
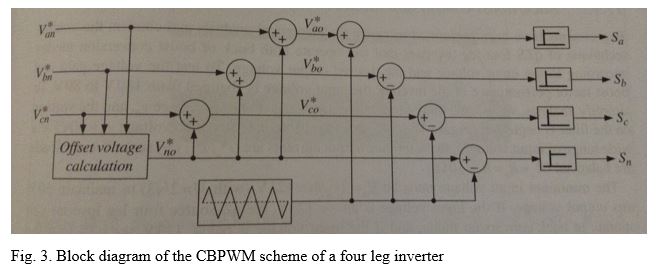
The advantage of CBPWM is that it is simple and cheaper to implement, however its performance in unbalance loads is not well known [1]. A drawback of this implementation is that a synchronous reference frame is not possible since we do not have a rotating reference vector [1].
References
[1] Y. Liu, Impedance source power electronic converters. Chichester, West Sussex, United Kingdom: IEEE Press, Wiley, 2016.
[2] S. Ei-Barbari and W. Hofmann, “Digital control of a four leg inverter for standalone photovoltaic systems with unbalanced load,” 2000 26th Annual Conference of the IEEE Industrial Electronics Society. IECON 2000. 2000 IEEE International Conference on Industrial Electronics, Control and Instrumentation. 21st Century Technologies and Industrial Opportunities (Cat. No.00CH37141), pp. 729–734, Aug. 2002.