
Report 2
Home | Introduction | Reports | Presentations | Results
Predictive Control
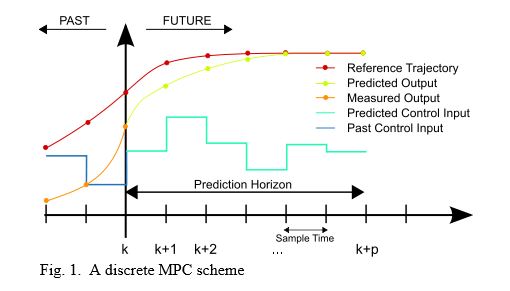
Model predictive control (MPC) is a method of achieving a level of consistency without any human control [1]. It has been in use for certain industries such as oil refineries since the 1980s but in recent years it has been seeing uses in power system balancing models [1]. MPCs rely on models of the systems they will control that are obtained by using statistical methods that often produce linear empirical models, these models are then processed to determine the optimal design for the system [1]. MPC offers engineers the ability to allow the controller to optimize not only the current discrete time slot, but also anticipate future time slots and change the controller accordingly [1]. A basic illustration of a general MPC scheme is shown below in [1, Fig. 1].
Predictive control in power converters utilize a cost function to minimize the error between measured values and reference values [2]. Three-phase neutral-point clamped (NPC) inverters utilize the predictive current control method [2]. The future values of the capacitor voltages and currents are predicted for every possible switching state of the inverter [2]. Once a prediction is made a cost function is then evaluated for each possible state and the state that best minimizes our cost function is used for the next time period [2]. While cost functions vary from applications they are generally vectors that compare the absolute value of the sum of our predicted values minus our actual value, an example cost function is listed below in [2, Eq. 1].

The complexity of the cost function and the values of certain terms such as ƛ will vary depending on the type of predictive control is being used as well as what the designer needs the converter to implement [2]. The advantage of the predictive current control method is that it does not need any linear controller or other modulation technique [2]. It effectively controls load currents and when pulse width modulation is utilized this method achieves a comparable dynamic response, reference tracking and can operate at lower switching frequencies [2]. This strategy also gives a designer many parameters and weighting factors that he can adjust for a given switching frequency or voltage balance [2].
Currently, MPC is a widely used strategy in process control [3]. In MPC, the control inputs are computed by repeatedly solving optimization problems which compute finite horizon predictions based on a model of the system [3]. Lately there have been further developments in advanced control methods, such as bang-bang, pseudo spectral and finite control-set model predictive control (FCS-MPC). In standalone power systems (SAPS) and power converters, MPC is utilized because of its ability to produce optimal results in the presence of realistic mechanical and electrical constraints.
In SAPS, the advantages of utilizing FCS-MPC is that they are
- Simple and easy to understand
- Digital controller friendly
- Contain a finite number of optimizations
- Eliminates PI controller and modulation stage
- Provides fast dynamic and good steady-state performance
- Compensates perturbations and dead-times of system
- Treats system nonlinearities and limitation
- Handles multivariable problem with Decoupling
The drawbacks of implementing a FCS-MPC in a SAPS are the large number of calculations required [3]. This is because during each sampling interval FCS-MPC will calculate online with a large number, this will lead to a higher computational burden than the linear control scheme [3]. This will require more costs in order to handle these large computations. In MPC a key designer tool is the ability to adjust weighting factors, if we want to get a cost function of an object, we will make sure the weight factors are set [3]. However, for FCS-MPS the weighting factors are unstable and the control variables process different physical natures that are easily effected [3]. FCS-MPC also has a need for an accurate model of the system, the discreet-time (DT) system model and prediction horizon are the main control criteria. If we want to get the best result we will need high precision approximate models [3].
In regards to the FCS-MPC, it is a simple concept that contains a wide array of applications within power converters that only require small alterations within the control algorithms [3]. In comparison studies the FCS-MPC has shown that it is vastly superior to classical linear controls in terms of dynamic response and control flexibility [3].
References
[1] “Model predictive control,” Wikipedia, 21-Sep-2017. [Online]. Available: https://en.wikipedia.org/wiki/Model_predictive_control. [Accessed: 03-Oct-2017].
[2] J. Rodriguez and P. Cortes, Predictive control of power converters and electrical drives. New York: John Wiley & Sons Inc, 2012.
[3] V. Yaramasu and B. Wu, Model predictive control of wind energy conversion systems. Piscataway: IEEE Press, 2017.